一种呼啦圈及其计数方法与流程
本发明涉及健身运动装置技术领域,具体地说涉及一种呼啦圈及其计数方法,用于准确计算呼啦圈的转动圈数。
背景技术:
随着人们生活水平的提高,人们对自身的身体健康更加重视,更愿意进行一些有益于身体健康的运动,也更愿意购买一些具有运动量化功能的健身设备,实时监测自己的运动情况,与好朋友分享自己的运动结果。呼啦圈是一种结构简单、易于学习的健身器材,转呼啦圈可以提供身体的协调性和柔韧性。现有的呼啦圈形式多样,功能繁多,如硬环呼啦圈、软环呼啦圈、泡沫呼啦圈、可拼接呼啦圈、按摩呼啦圈等,但其规格、尺寸与重量均没有严格标准,在采用呼啦圈进行健身时,若没有合理的规划,盲目使用会导致运动过量,进而伤及到人体腹部、背部肌肉或人体脏器,如肾脏、脾脏等。因此,通过计算呼啦圈的转动圈数来合理控制运动量,有助于科学的健身。
呼啦圈在使用时,其转动形式较为复杂,首先人体在转动时会周期性的摆动;其次是呼啦圈转动时是紧贴人体的,两者呈滚动关系。通常认为呼啦圈恢复到上一次位置为转动一圈,例如呼啦圈两次离人体正前方最远为一圈。但由于人体和呼啦圈直径的差异,呼啦圈转动一圈时,实际上呼啦圈上的某一特定点,在转一圈后不会回到原来位置,导致转动呼啦圈计数的一圈不是呼啦圈绕圆心转动的一圈。另外,呼啦圈在转动时的速度也较快。基于这些原因,导致呼啦圈的转动圈数难以准确计算。
为了能够有效计算呼啦圈的转动圈数,目前常用的方案是在呼啦圈上安装一个传感器(如加速度传感器、陀螺仪传感器、地磁传感器等),但这种单纯的安装一个传感器,在呼啦圈转动的一圈时,其传感器探测的值还没有达到一圈,因此是无法准确的对转动呼啦圈进行计数的。即使采用比例系数进行补偿修正,但由于不同的人身体腰围不一样,修正系数不能适应所有锻炼者,也会导致计数圈数不准确。
另外,公告号为cn103223238a的文献采用了呼啦圈外部探测装置,每次呼啦圈距离外部探测装备最近时计数器增加一次计数值与转动呼啦圈个数一致,但是,此装置复杂需要另外一人持外部探测装置靠近转动的呼啦圈操作才能计数,设备操作复杂,不利于推广。
进一步的,公告号为cn203425445u的文献还公开了一种多功能计数呼啦圈,其在呼啦圈内安装有可沿其内部空间滑动的圈数采集器,圈数采集器与显示数据的健身终端连接;圈数采集器包括用于计数用的三维电子罗盘,三维电子罗盘与进行数据处理的单片机mcu处理模块连接,单片机mcu处理模块上连接有用于与健身终端通讯用的第一2.4g无线模块;健身终端包括用于测量步数的三轴加速度传感器,三轴加速度传感器与单片机mcu控制电路连接,单片机mcu控制电路上连接有用于与圈数采集器通讯用的第二2.4g无线模块和用于显示数据的oled显示模块。该专利文献的原理是圈数采集器安装在呼啦圈内部,由于呼啦圈内部空间贯通,圈数采集器可以在进行呼啦圈运动时自由地在呼啦圈内部进行滑动,由物体做圆周运动时会产生离心现象可知,当人们使用呼啦圈的时候,由于离心现象,圈数采集器会始终处于远离人体的一端,因此圈数采集器的运动圈数就会与实际运动中呼啦圈的运动圈数保持一致,通过统计圈数采集器的运动圈数就可以准确的得到实际的运动圈数,从而实现计数功能。但在实际转动时,呼啦圈转动一圈与圈数采集器在呼啦圈内部转动一圈是不一样的,需要采用两者转动圈数比例系数进行修正,而不同运动员的体型不一样,修正系数也不能通用。另外,各个呼啦圈内的摩擦系数是不同的,各运动员的转动呼啦圈的速度也是不同的。因此通过统计圈数采集器的运动圈数仍然不能准确地得出运动员真正转动呼啦圈的圈数。
技术实现要素:
本发明的目的在于解决现有技术中存在的上述问题,提供一种呼啦圈及其计数方法,本发明能够准确地计算呼啦圈的转动圈数,从而有助于人们科学的健身。
为实现上述目的,本发明采用的技术方案如下:
一种呼啦圈,其特征在于:所述呼啦圈上固定有信号处理器、信息播报器、用于采集转动角速度值的陀螺仪和至少两套用于采集呼啦圈加速度值的加速度传感器,所述加速度传感器以呼啦圈的圆心为中心均匀设置在呼啦圈上;所述信号处理器分别与信息播报器、陀螺仪和加速度传感器连接,信号处理器根据采集的加速度值和转动角速度值计算呼啦圈的转动圈数,并将计算出的转动圈数发送给信息播报器。
所述呼啦圈上固定有用于测量地磁信息的磁力计,磁力计与信号处理器连接,信号处理器通过磁力计采集的地磁信息对呼啦圈的转动圈数进行误差校正。
所述加速度传感器、磁力计、信号处理器和陀螺仪均安装在电路板上,加速度传感器、磁力计和陀螺仪均通过电路板与信号处理器连接。
所述呼啦圈上固定有用于为信号处理器、信息播报器和加速度传感器供电的供电模块。
所述呼啦圈上固定有用于与信号处理器电性连接的信号传输模块,信号处理器通过信号传输模块将计算出的转动圈数发送至移动终端。
所述呼啦圈上设置有用于与信号处理器连接的按键开关。
所述磁力计、信号处理器、供电模块、信号传输模块和加速度传感器均通过螺钉或卡扣固定在呼啦圈内,所述信息播报器和按键开关固定在呼啦圈的外表面上或镶嵌在呼啦圈上。
所述信息播报器为用于显示转动圈数的显示屏和/或用于播报转动圈数的扬声器。
一种呼啦圈的计数方法,其特征在于:
(1)设定呼啦圈上设置有信号处理器、用于采集转动角速度值的陀螺仪和至少两套均匀布置在呼啦圈上用于采集加速度值的加速度传感器;设定陀螺仪和加速度传感器分别基于自身位置处于一个自身坐标系中,自身坐标系随呼啦圈转动;
(2)设定呼啦圈静置,此时将陀螺仪的自身坐标系作为基准空间坐标系;然后设定此时陀螺仪自身坐标系相对于基准空间坐标系的累计转动角为零,将此时各套加速度传感器基于自身坐标系的加速度值投影至基准空间坐标系后的值设定为初始加速度;
在上述条件下,所述的计数方法包括以下步骤:
s1:由信号处理器控制加速度传感器和陀螺仪按周期连续采集,得到各套加速度传感器在自身坐标系中的加速度值和陀螺仪在自身坐标系中转动角速度值;
s2:信号处理器根据转动角速度值计算陀螺仪每个周期内自身坐标系的转动角,然后将每个周期内的转动角分别与上一周期得到的累计转动角相加,得到该周期时陀螺仪自身坐标系相对于静置时基准空间坐标系的累计转动角;
s3:根据设定条件中各套加速度传感器和陀螺仪的位置关系,由信号处理器先将步骤s1得到的各套加速度传感器基于自身坐标系中的加速度值投影至陀螺仪自身坐标系中;再根据步骤s2得到的累计转动角,将各套加速度传感器投影在陀螺仪自身坐标系中的加速度值转换至基准空间坐标系中的加速度值;然后将各套加速度传感器在基准空间坐标系中的加速度值分别减去各套加速度传感器的初始加速度;再对各套加速度传感器在基准空间坐标系的加速度值求矢量和,最后除以加速度传感器的数量,得到每个周期内呼啦圈圆心在基准空间坐标系中的加速度;
s4:根据步骤s3的结果,由信号处理器计算每个周期内呼啦圈圆心的加速度幅值,并计算该加速度矢量的三个加速度指向角;
s5:将每个周期内呼啦圈圆心的加速度幅值依次与设定阈值比较,若某一周期内的加速度幅值大于等于设定阈值,判定呼啦圈处于转动状态,从该周期开始连续存储呼啦圈圆心的加速度幅值和加速度指向角,得到一连串加速度幅值数据和加速度指向角数据;
s6:对步骤s5存储的加速度指向角数据进行判断,若该连串加速度指向角数据中的至少一个方向的加速度指向角以递增或递减的方式共变化360°,则判定呼啦圈转动一圈,信号处理器对转动圈计数加1并播报。
所述步骤s2中陀螺仪基于自身坐标系在每个周期内的转动角由该周期内的转动角速度值乘以周期得出。
所述步骤s4中,所述的三个加速度指向角是指在直角坐标系中,满足右手定则,右手大拇指与坐标轴同向,加速度矢量投影在坐标轴垂直平面上,该投影与三轴正向形成第一个平面顺着右手四手指指向的夹角,定义为该轴的加速度指向角,角度值为0—360°。
所述步骤s5中,当加速度幅值先出现大于等于设定阈值,再出现小于设定阈值的情况时,判定呼啦圈停止转动,信号处理器不再存储呼啦圈圆心的加速度幅值和加速度指向角,并清除之前存储的加速度幅值和加速度指向角;当再次出现大于等于设定阈值时,判定呼啦圈再次开始转动,按步骤s5继续执行,重新存储呼啦圈圆心的加速度幅值和加速度指向角。
所述步骤s5中,当完成呼啦圈一圈的计数后,除保留本周期的呼啦圈圆心加速度幅值数据和加速度指向角数据并作为起始数据外,其余数据均清除。
所述的计数方法中,呼啦圈上安装有用于测量地磁信息的磁力计,设定磁力计处于一个自身坐标系中,且磁力计自身坐标系的指向与陀螺仪自身坐标系指向一致;呼啦圈静置时,将磁力计基于自身坐标系的地磁信息投影至基准空间坐标系后的信息设定为初始地磁信息;每个周期信号处理器根据采集基于自身坐标系的地磁信息和初始地磁信息修正陀螺仪该周期的累计转动角度的计算误差。
采用本发明的优点在于:
1、本发明通过设置在呼啦圈上的陀螺仪能够采集呼啦圈的转动角速度值,通过加速度传感器能够采集呼啦圈的加速度值,由于加速度传感器均匀分布在呼啦圈上,因此加速度传感器的位置可以为已知。在此基础上,通过信号处理器与陀螺仪和加速度传感器采集到的数据,就能够在呼啦圈转动时计算出每个周期内呼啦圈圆心的加速度幅值和该加速度矢量的三个加速度指向角,进而依此来精确判定呼啦圈的转动圈数。并且,信号处理器还能够将判定结果发送给信息播报器进行播报,极大地方便了人们了解运动情况,有助于人们科学的健身。
2、本发明在呼啦圈上固定有用于测量地磁信息的磁力计,由于磁力计测量的是地磁信息,其不会随呼啦圈的转动而变化,因此根据磁力计可以修正计算过程中的误差,从而对呼啦圈的转动圈数进行误差校正,达到进一步提升计数精度的目的。
3、本发明在呼啦圈上固定有用于与信号处理器电性连接的信号传输模块,通过信号传输模块有利于将计算出的转动圈数发送至移动终端进行察看等。
4、本发明在呼啦圈上设置有用于与信号处理器连接的按键开关,通过按键开关便于信号处理器的快速开闭,更加方便使用。
7、本发明将磁力计、信号处理器、供电模块、信号传输模块和加速度传感器均通过螺钉或卡扣固定在呼啦圈内,将信息播报器和按键开关固定在呼啦圈的外表面上或镶嵌在呼啦圈上。该结构既有利于对磁力计、信号处理器、供电模块、信号传输模块等进行保护,又有利于为人们清楚播报运动结果。
8、本发明中的信息播报器为用于显示转动圈数的显示屏和/或用于播报转动圈数的扬声器,转动圈数的播报方式更加多元化,适用于不同人群。
9、本发明采用特定的计数方法,能够有效地准确计算呼啦圈的转动圈数。其优点在其测量呼啦圈转动圈数的原理。具体而言,多个加速度传感器均匀安装在呼啦圈圈体上,其测量值包括三部分:垂直向下重力加速度、绕人体转动指向人体的呼啦圈圆心加速度和绕呼啦圈圆心转动指向呼啦圈圆心的加速度。通过呼啦圈上设置均匀分布的多路加速度传感器,该部分加速度矢量和为零,计算时通过求和,可消除该部分影响;通过陀螺仪对加速度传感器自身坐标系累计转动角度的精确计算,并结合初始时测量的重力加速度,计算时可精确扣除重力加速度,消除该部分影响;最终求得的呼啦圈圆心加速度,呼啦圈圆心加速度始终指向人体,当呼啦圈转动一圈时,刚好是呼啦圈圆心加速度方向转动一圈,可以精确测量呼啦圈转动圈数。
10、本发明将陀螺仪和加速度传感器分别设置基于自身位置处于一个自身坐标系,并把所有测量结果都投影或变换至和基准空间坐标系中,其优点是加速度传感器和陀螺仪都是基于自身坐标系进行测量的,方便读出测试数据,但呼啦圈转动是基于人体空间来判断的,通过投影和变换至与人体所在空间的基准空间坐标系,有利于对指向人体的呼啦圈圆心加速度转动一圈判断。
11、本发明将静置时各套加速度传感器基于自身坐标系的加速度值投影至基准空间坐标系后的值设定为初始加速度,其优点是可以精确测量当地位置的重力加速度,有利于呼啦圈转动时精确扣除重力加速度分量。
12、本发明在整个计数方法中,先根据转动角速度值计算累计转动角,其优点是有利于确定陀螺仪自身坐标系转动参数,为后续所有加速度传感器测量值转换至基准空间坐标系提供参数。
13、本发明通过呼啦圈圆心的加速度幅值和该加速度矢量的三个加速度指向角,并以此来判定呼啦圈的转动圈数,其优点是不仅可以确认呼啦圈是否是在转动,减少误判,还可准确判断呼啦圈转动圆心相对于人体转动角,进而确定呼啦圈转动圈数。
14、本发明不仅适用用于呼啦圈绕人体水平转动的记数,还适用于与水平面有一定斜角的记数,甚至适用于绕手臂的竖直方向记数。
附图说明
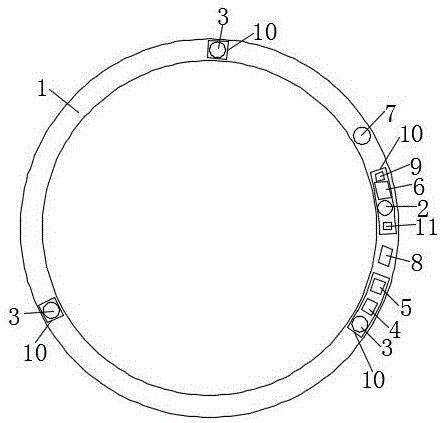
图1为本发明的结构示意图;
图2为本发明的原理框图;
图3为本发明中呼啦圈转动前初始位置的示意图;
图4为本发明中呼啦圈转动到一定角度时的示意图;
图中标记为:1、呼啦圈,2、信号处理器,3、加速度传感器,4、陀螺仪,5、磁力计,6、显示屏,7、扬声器,8、供电模块,9、按键开关,10、电路板,11、信号传输模块。
具体实施方式
实施例1
本实施例提供了一种呼啦圈1,如图1、2所示,所述呼啦圈1上固定有信号处理器2、信息播报器、供电模块8、用于采集转动角速度值的陀螺仪4和至少两套用于采集呼啦圈1加速度值的加速度传感器3,所述加速度传感器3以呼啦圈1的圆心为中心均匀设置在呼啦圈1上;所述信号处理器2分别与信息播报器、陀螺仪4和加速度传感器3连接,信号处理器2根据采集的加速度值和转动角速度值计算呼啦圈1的转动圈数,并将计算出的转动圈数发送给信息播报器进行播报,信息播报器为用于显示转动圈数的显示屏6和/或用于播报转动圈数的扬声器7;所述供电模块8用于为信号处理器2、信息播报器和加速度传感器3供电。进一步的,所述呼啦圈1上固定有用于测量地磁信息的磁力计5,磁力计5与信号处理器2连接,信号处理器2通过磁力计5采集的地磁信息对呼啦圈1的转动圈数进行误差校正。
本实施例中,所述加速度传感器3、磁力计5、信号处理器2和陀螺仪4均安装在电路板10上,加速度传感器3、磁力计5和陀螺仪4均通过电路板10与信号处理器2连接。其中,为了便于准确计数,优选磁力计5和陀螺仪4与其中一套加速度传感器3共用一块电路板10,即磁力计5和陀螺仪4与其中一套加速度传感器3安装在同一块电路板10上。
本实施例中,所述呼啦圈1上固定有用于与信号处理器2电性连接的信号传输模块11,信号处理器2通过信号传输模块11将计算出的转动圈数发送至诸如平板电脑、手机等移动终端上。
本实施例中,所述呼啦圈1上设置有用于与信号处理器2连接的按键开关9,按下按键开关9,信号处理器2即控制陀螺仪4、磁力计5和加速度传感器3开始采集数据,再次按下按键开关9,信号处理器2即控制陀螺仪4、磁力计5和加速度传感器3停止采集数据。
本实施例中,所述磁力计5、信号处理器2、供电模块8、信号传输模块11和加速度传感器3均优选通过螺钉或卡扣固定在呼啦圈1内,所述信息播报器和按键开关9优选固定在呼啦圈1的外表面上或镶嵌在呼啦圈1上。
本实施例中,所述信号处理器2可采用型号stm32f103,厂家st公司;磁力计5可采用型号hmc5883,厂家honeywey公司;加速度传感器3和陀螺仪4可采用型号mpu-6050,厂家tdk公司,mpu-6050可集成加速度传感器3和陀螺仪4,供电模块8主要包括3.7v锂离子电池可采用型号nsc1340,厂家beauty公司;充电管理芯片可采用型号tp4056,厂家南京拓微公司;稳压芯片可采用型号lt1963,厂家adi公司;信号传输模块11可采用型号hc-05蓝牙模块。
实施例2
本实施例提供了一种呼啦圈1的计数方法,先设定如下条件:
(1)设定呼啦圈1上设置有信号处理器2、用于采集转动角速度值的陀螺仪4和至少两套均匀布置在呼啦圈1上用于采集加速度值的加速度传感器3;设定陀螺仪4和加速度传感器3分别基于自身位置处于一个自身坐标系中,自身坐标系随呼啦圈1转动而转动。
(2)设定呼啦圈1静置,此时将陀螺仪4的自身坐标系作为基准空间坐标系;然后设定此时陀螺仪4自身坐标系相对于基准空间坐标系的累计转动角为零,将此时各套加速度传感器3基于自身坐标系的加速度值投影至基准空间坐标系后的值设定为初始加速度。
在上述条件下,所述的计数方法包括以下步骤:
s1:由信号处理器2控制加速度传感器3和陀螺仪4按周期连续采集,得到各套加速度传感器3在自身坐标系中的加速度值和陀螺仪4在自身坐标系中转动角速度值。
s2:信号处理器2根据转动角速度值计算陀螺仪4每个周期内自身坐标系的转动角,然后将每个周期内的转动角分别与上一周期得到的累计转动角相加,得到该周期时陀螺仪4自身坐标系相对于静置时基准空间坐标系的累计转动角。
本步骤中,所述的陀螺仪4基于自身坐标系在每个周期内的转动角由该周期内的转动角速度值乘以周期得出。
本步骤中,所述的累计转动角是指该周期的转动角与之前所有周期的转动角之和,例如,第二周期的累计转动角为第一周期的转动角与第二周期的转动角之和,第三周期的累计转动角为第二周期的累计转动角与第三周期的转动角之和,以此类推。
s3:根据设定条件中各套加速度传感器3和陀螺仪4的位置关系,由信号处理器2先将步骤s1得到的各套加速度传感器3基于自身坐标系中的加速度值投影至陀螺仪4自身坐标系中;再根据步骤s2得到的累计转动角,将各套加速度传感器3投影在陀螺仪4自身坐标系中的加速度值转换至基准空间坐标系中的加速度值;然后将各套加速度传感器3在基准空间坐标系中的加速度值分别减去各套加速度传感器3的初始加速度;再对各套加速度传感器3在基准空间坐标系的加速度值求矢量和,最后除以加速度传感器3的数量,得到每个周期内呼啦圈1圆心在基准空间坐标系中的加速度。
s4:根据步骤s3的结果,由信号处理器2计算每个周期内呼啦圈1圆心的加速度幅值,并计算该加速度矢量的三个加速度指向角。
本步骤中,所述的三个加速度指向角是指在直角坐标系中,满足右手定则,右手大拇指与坐标轴同向,加速度矢量投影在坐标轴垂直平面上,该投影与三轴正向形成第一个平面顺着右手四手指指向的夹角,定义为该轴的加速度指向角,角度值为0—360°。
s5:将每个周期内呼啦圈1圆心的加速度幅值依次与设定阈值比较,若某一周期内的加速度幅值大于等于设定阈值,判定呼啦圈1处于转动状态,从该周期开始连续存储呼啦圈1圆心的加速度幅值和加速度指向角,得到一连串加速度幅值数据和加速度指向角数据。
本步骤中,当加速度幅值先出现大于等于设定阈值,再出现小于设定阈值的情况时,判定呼啦圈1停止转动,信号处理器2不再存储呼啦圈1圆心的加速度幅值和加速度指向角,并清除之前存储的加速度幅值和加速度指向角;当再次出现大于等于设定阈值时,判定呼啦圈1再次开始转动,按步骤s5继续执行,重新存储呼啦圈1圆心的加速度幅值和加速度指向角。
本步骤中,当完成呼啦圈1一圈的计数后,除保留本周期的呼啦圈1圆心加速度幅值数据和加速度指向角数据并作为起始数据外,其余数据均清除。
s6:对步骤s5存储的加速度指向角数据进行判断,若该连串加速度指向角数据中的至少一个方向的加速度指向角以递增或递减的方式共变化360°,则判定呼啦圈1转动一圈,信号处理器2对转动圈计数加1并通过信息播报器播报。
本实施例中,所述的计数方法中,呼啦圈1上安装有用于测量地磁信息的磁力计5,设定磁力计5处于一个自身坐标系中,且磁力计5自身坐标系的指向与陀螺仪4自身坐标系指向一致;呼啦圈1静置时,将磁力计5基于自身坐标系的地磁信息投影至基准空间坐标系后的信息设定为初始地磁信息;每个周期信号处理器2根据采集基于自身坐标系的地磁信息和初始地磁信息修正陀螺仪4该周期的累计转动角度的计算误差。
本实施例所述的计数方法中,所述呼啦圈1上固定有用于为信号处理器2、信息播报器和加速度传感器3供电的供电模块8,所述呼啦圈1上设置有用于与信号处理器2连接的按键开关9。所述呼啦圈1上固定有用于与信号处理器2电性连接的信号传输模块11,信号处理器2可通过信号传输模块11将计算出的转动圈数发送至移动终端。所述磁力计5、信号处理器2、供电模块8、信号传输模块11和加速度传感器3均通过螺钉或卡扣固定在呼啦圈1内,所述信息播报器和按键开关9固定在呼啦圈1的外表面上或镶嵌在呼啦圈1上。所述信息播报器为用于显示转动圈数的显示屏6和/或用于播报转动圈数的扬声器7。
实施例3
在实施例2的基础上,本实施例结合附图3-4根据实际应用过程来说明具体的计数方法,具体过程如下:
(1)设定加速度传感器的数量为四套,分别位于图3中a、b、c和d点,陀螺仪和磁力计位于a点,陀螺仪、磁力计和四套加速度传感器分别基于自身位置处于一个自身坐标系(x,y,z)中,自身坐标系随呼啦圈转动,安装时使陀螺仪和四套加速度传感器的自身坐标系(x,y,z)指向相同,如图3所示,由于陀螺仪、磁力计和其中一组加速度传感器都位于a点,因此陀螺仪、磁力计和该加速度传感器的自身坐标系相同。
(2)设定呼啦圈静置,呼啦圈与人体交会点m1,此时将陀螺仪的自身坐标系(x,y,z)作为基准空间坐标系(x,y,z),图3中为方便观看进行了平移;然后设定此时陀螺仪自身坐标系相对于基准空间坐标系(x,y,z)的累计转动角(ψx,ψy,ψz)为零,将此时各套加速度传感器基于自身坐标系(x,y,z)的加速度值((aax0,aay0,aaz0)、(abx0,aby0,abz0)、(acx0,acy0,acz0)、(adx0,ady0,adz0))投影至基准空间坐标系后的值设定为初始加速度((gax,gay,aaz)、(gbx,gby,gbz)、(gcx,gcy,gcz)、(gdx,gdy,gdz)),该值为重力加速度;把磁力计传感器基于自身坐标系(x,y,z)磁场值(bax0,bay0,baz0)投影至基准空间坐标系后的值设定为初始磁场值(bax,bay,baz),该值为地磁信息。
本步骤中,呼啦圈圈静置时加速度传感器、磁力计和陀螺仪自身坐标系指向相同,因此计算公式为:
在上述条件下,所述的计数方法包括以下步骤:
s1:由信号处理器控制加速度传感器和陀螺仪按周期t连续采集,得到各套加速度传感器在自身坐标系中的加速度值((aax,aay,aaz)、(abx,aby,abz)、(acx,acy,acz)、(adx,ady,adz))、陀螺仪在自身坐标系中转动角速度值(ωx,ωy,ωz)和磁场值(bax,bay,baz)。
s2:信号处理器根据转动角速度值计算陀螺仪每个周期内自身坐标系的转动角(ψx,ψy,ψz)。然后将每个周期内的转动角分别与上一周期得到的累计转动角相加,得到该周期时陀螺仪自身坐标系相对于静置时基准空间坐标系的累计转动角(ψx(t),ψy(t),ψz(t)),如转动至图4位置,呼啦圈与人体交会点m2。
本步骤中,所述的陀螺仪基于自身坐标系在每个周期内的转动角由该周期内的转动角速度值乘以周期得出,即ψx=ωx*t、ψy=ωy*t、ψz=ωz*t。
本步骤中,所述的累计转动角是指该周期的转动角与之前所有周期的转动角之和,例如,第二周期的累计转动角为第一周期的转动角与第二周期的转动角之和,第三周期的累计转动角为第二周期的累计转动角与第三周期的转动角之和,以此类推,即ψx(i)=ψx+ψx(i-1),ψy(i)=ψy+ψy(i-1),ψz(i)=ψz+ψz(i-1),其中(i)指本周期,(i-1)指上一周期。
s3:根据设定条件中各套加速度传感器、磁力计和陀螺仪的位置关系,由信号处理器先将步骤s1得到的各套加速度传感器基于自身坐标系中的加速度值、磁力计投影至陀螺仪自身坐标系中,计为((aax',aay',aaz')、(abx',aby',abz')、(acx',acy',acz')、(adx',ady',adz'),(bax',bay',baz'));再根据步骤s2得到的累计转动角,将各套加速度传感器投影在陀螺仪自身坐标系中的加速度值转换至基准空间坐标系中的加速度值((aax,aay,aaz)、(abx,aby,abz)、(acx,acy,acz)、(adx,ady,adz)),并将磁力计投影在陀螺仪自身坐标系中的磁场值转换至基准空间坐标系中的磁场值(bax,bay,baz);然后将各套加速度传感器在基准空间坐标系中的加速度值分别减去各套加速度传感器的初始加速度;再对各套加速度传感器在基准空间坐标系的加速度值求矢量和,最后除以加速度传感器的数量,得到每个周期内呼啦圈圆心在基准空间坐标系中的加速度(ahz,ahy,ahz);通过磁场值(bax,bay,baz)与初始磁场值(bax,bay,baz)关系修正累计转动角误差。
本步骤中,各套加速度传感器基于自身坐标系中的加速度值投影至陀螺仪自身坐标系中,其中的计算,根据步骤(1)加速度传感器和陀螺仪自身坐标系指向相同,因此计算公式如下:
本步骤中,磁力计基于自身坐标系中的磁场值投影至陀螺仪自身坐标系中,其中的计算,根据步骤(1)磁力计和陀螺仪自身坐标系指向相同,因此计算公式如下:
本步骤中,将陀螺仪投影在陀螺仪自身坐标系中的磁场值转换至基准空间坐标系中的加速度值,计算公式如下:
其中|ψ|为坐标旋转矩阵,形式如下:
由于地磁信息不随在基准空间坐标系保持不变,因此每次测量磁场值经坐标变换后结果与初始磁场值相同,即:
若不相等时,则认为系统的累计转动角不准,通过以下公式解算|ψ|,用于修正坐标旋转矩阵,以此修正坐标旋转矩阵对后续的加速度值变换进行计算,解算|ψ|的公式为:
本步骤中,将各套加速度传感器投影在陀螺仪自身坐标系中的加速度值转换至基准空间坐标系中的加速度值,计算公式为:
本步骤中,将各套加速度传感器在基准空间坐标系中的加速度值分别减去各套加速度传感器的初始加速度;再对各套加速度传感器在基准空间坐标系的加速度值求矢量和,最后除以加速度传感器的数量,得到每个周期内呼啦圈圆心在基准空间坐标系中的加速度,其计算公式为:
s4:根据步骤s3的结果,由信号处理器计算每个周期内呼啦圈圆心的加速度幅值|a|h(t),并计算该加速度矢量的三个加速度指向角(φhx(t),φhy(t),φhz(t))。
本步骤中,所述的三个加速度指向角是指在直角坐标系中,满足右手定则,右手大拇指与坐标轴同向,加速度矢量投影在轴垂直平面上,该投影与三轴正向形成第一个平面顺着右手四手指指向的夹角,定义为该轴的加速度指向角,角度值为0—360°。
本步骤中,加速度幅值和三个加速度指向角的计算公式分别为:
s5:将每个周期内呼啦圈圆心的加速度幅值依次与设定阈值比较,若某一周期内的加速度幅值大于等于设定阈值,判定呼啦圈处于转动状态,从该周期开始连续存储呼啦圈圆心的加速度幅值和加速度指向角,得到一连串加速度幅值数据(|a|h(1),|a|h(2),…,|a|h(n))和加速度指向角数据((φhx(1),φhy(1),φhz(1)),(φhx(2),φhy(2),φhz(2)),…,(φhx(n),φhy(n),φhz(n))),其中n为数据个数。
本步骤中,当加速度幅值先出现大于等于设定阈值,再出现小于设定阈值的情况时,判定呼啦圈停止转动,信号处理器不再存储呼啦圈圆心的加速度幅值和加速度指向角,并清除之前存储的加速度幅值和加速度指向角;当再次出现大于等于设定阈值时,判定呼啦圈再次开始转动,按步骤s5继续执行,清除之前数据,重新存储呼啦圈圆心的加速度幅值和加速度指向角。
本步骤中,当完成呼啦圈一圈的计数后,除本周期的呼啦圈圆心加速度幅值数据和加速度指向角数保留作为起始数据外,其余数据均清除。
s6:对步骤s5存储的加速度指向角数据进行判断,若该连串加速度指向角数据中的至少一个方向的加速度指向角((φhx(n)和/或φhy(n)和/或φhz(n)))以递增或递减的方式共变化360°,则判定呼啦圈转动一圈,信号处理器计数加1并通过信息播报器播报。
相关知识
一种呼啦圈及其计数方法与流程
一种智能呼啦圈的制作方法
呼啦圈校本课程计划
一种呼啦圈的连接节的制作方法
一种手持式呼啦圈的制作方法
呼啦圈活动计划(八篇)
一种多功能呼啦圈的制作方法
呼啦圈社团活动设计
呼啦圈减肥方法
【那种呼啦圈减肥效果好】方法
网址: 一种呼啦圈及其计数方法与流程 https://m.trfsz.com/newsview1306212.html