破解机器人抓握破损难题:新型超轻压力传感器赋予机械手精准力觉与识物能力
破解机器人抓握破损难题:新型超轻压力传感器赋予机械手精准力觉与识物能力
在科技飞速发展的今天,我们已经习惯了机器人在工厂里搬运重物,或者在屏幕里与我们进行流畅的对话。然而,当你想让一个最先进的家用机器人帮你从厨房拿一块柔软的内酯豆腐,或者让它帮忙整理桌上的几张薄纸时,它往往会遇到巨大的困难。现有的机械手大多缺乏细腻的触觉感知能力,它们很难准确判断自己到底用了多大的力气,结果往往是直接捏碎了柔软的食物,或者根本抓不起来轻薄的物件。
为了解决这一问题,科研人员一直在努力开发能够贴附在机器手表面的柔性压力传感器。但是,现有的传感器技术往往面临一个矛盾:如果要把传感器做得非常灵敏,用来感知极轻微的触碰,它往往无法承受较大的压力,一压就坏;如果把它做得非常坚固耐压,它又会对轻微的接触毫无反应。
近期,河北工业大学与宾夕法尼亚州立大学的研究团队合作,在这一技术领域取得了重要突破。他们研发出了一种基于石墨烯材料的新型柔性压力传感器。这种传感器极其轻巧,不仅能够敏锐捕捉极其微弱的压力,还能承受巨大的重压。更为关键的是,结合先进的计算机算法,这种传感器能让冷冰冰的机械手真正拥有触觉,实现精细的无损抓取,甚至仅靠物理触碰就能准确识别出不同的厨房食材。
1. 改变内部结构的巧思:兼顾极高灵敏度与抗压能力
要让传感器同时具备敏锐的感知力和强大的抗压性,核心在于制造传感器的基础材料。研究团队选择了一种名为石墨烯的碳材料,并将其制造成了拥有丰富孔洞的气凝胶。
通常情况下,普通气凝胶或海绵内部的孔洞是杂乱无章的,当它们受到外力反复挤压时,内部结构很容易发生坍塌和破损。为了解决这个问题,研究人员采用了一种利用温度控制冰晶生长的特殊工艺。简单来说,在材料成型的过程中,他们通过控制底部的低温,让材料内部的水分专门顺着同一个方向结成细长的冰晶。随后,通过干燥技术将这些冰晶直接抽走,气凝胶内部就留下了一排排排列整齐、方向一致的微小管状孔洞。
这种结构上的改变带来了惊人的效果。整齐排列的孔洞不仅为材料提供了充足的收缩变形空间,还赋予了它极强的单向支撑力。我们从图[1]中可以清晰地看到这种材料在物理重量上的极致轻盈:一小块成型的石墨烯气凝胶被直接放置在一朵毛茸茸的蒲公英冠毛上,而蒲公英脆弱的绒毛竟然没有丝毫弯折。科学测量显示,这种材料的密度仅仅只有 10 毫克每立方厘米。
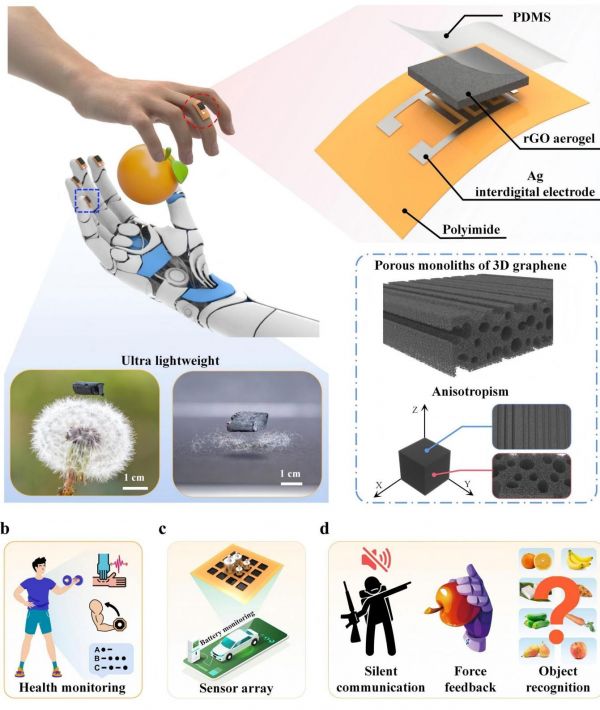
Figure 1
尽管重量轻得几乎让人感觉不到,它的性能却异常强悍。它不仅能够敏锐地检测到低至 1 帕斯卡的极微小压力,还能在高达 100 千帕的大压力环境下正常工作。研究人员对其进行了极其严苛的疲劳测试,在经历了多达两万次的反复重压和卸力循环后,传感器的结构依然保持完好,对压力的电信号反馈也依然准确无误。
2. 捕捉人体微弱信号:从监测心率到记录关节运动
得益于其出色的物理特性,这款传感器对压力的反应极其迅速。当受到外力时,它在 120 毫秒内就能产生清晰的信号,而在压力撤除后,仅需 40 毫秒就能恢复原状。这种极高的灵敏度和极快的响应速度,使其非常适合用于监测人体细微的生理活动。
研究人员将这种柔性传感器通过医用胶带贴附在一名健康志愿者的手腕上,用它来监测桡动脉的脉搏跳动。测试结果表明,传感器能够持续、稳定地输出脉搏波形的电信号。医疗专业人员可以通过这些波形中细微的起伏特征,精确计算出志愿者的心率为每分钟 67 次,并进一步评估其心血管的健康状态。即使志愿者处于快走或慢跑的运动状态中,传感器依然能够牢牢捕捉到因运动引起的心率上升和脉搏变化。
除了脉搏,人体的肢体运动同样可以被精准量化。通过图[2]展示的实际测试,我们可以看到,当传感器被分别固定在手腕、手肘以及手指的关节处时,无论是手臂的弯曲,还是手指在 30 度、60 度、90 度等不同程度的弯折,传感器都能实时输出对应强度且规律性极强的电信号变化波形。不仅如此,测试者还可以用手指在传感器表面进行短促的“点”和较长的“按”,系统能够将这些触碰信号直接翻译成相应的摩斯密码,并在波形图上明确显示出“H”、“E”、“B”、“U”和“T”等字母序列。这些结果证明了该传感器在医疗健康监测和日常人机交互领域的巨大应用价值。
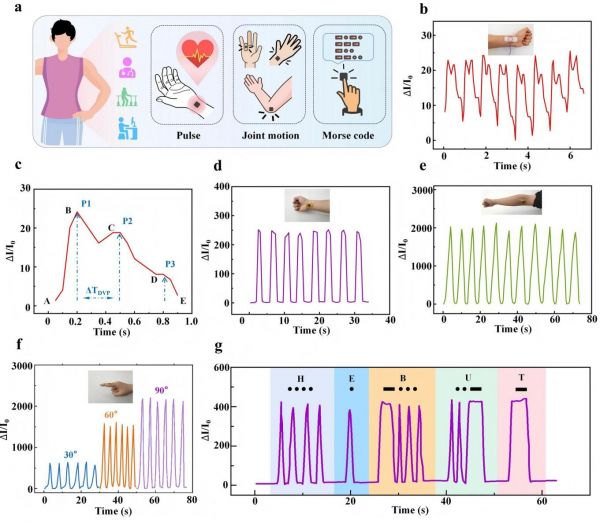
Figure 2
3. 面式感知:空间压力分布成像与新能源电池安全监测
单个压力传感器只能获取一个点的受力情况。为了让传感器能够像一整块完整的感知网络那样工作,研究团队将多个独立的传感器单元组合在一起,形成了一个 4行 4列的传感器阵列。
通过与微型处理器和计算机软件的连接,这个传感器阵列能够实时将不同区域的受力情况转化为可视化的图像。观察图[3]中的阵列测试结果,我们可以发现,当研究人员在阵列平面上放置三个底部受力不均的乐高人物模型,或者放上一个底部并非完全平整的苹果时,传感器阵列精准地探测到了每个局部区域的轻重变化。在配套的电脑屏幕上,这些数据被实时转化为色彩对比鲜明的平面方格图,以及高低错落的 3D 柱状图,直观地还原了物体的底部接触轮廓和受力重心。
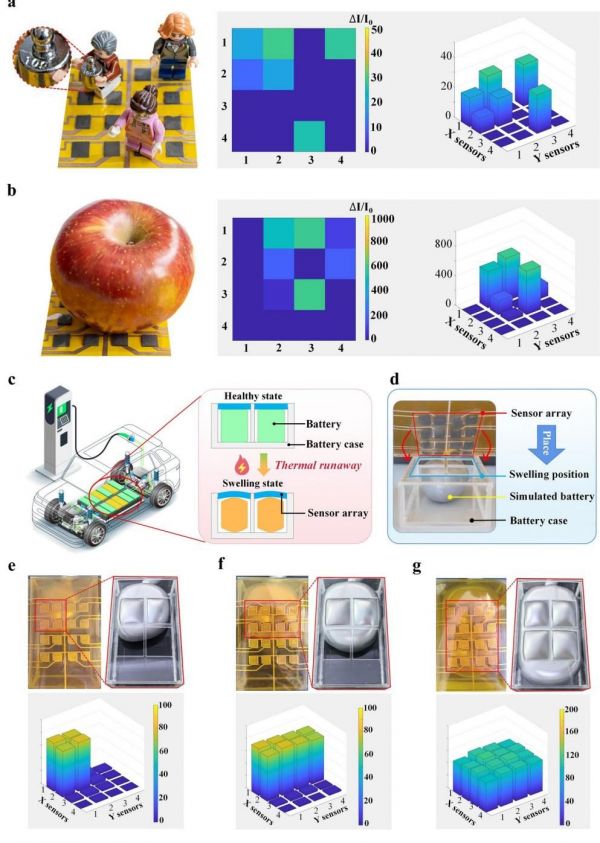
Figure 3
研究团队进一步拓展了这项技术的应用边界,将其引入了备受关注的新能源汽车安全领域。电动汽车在充电、放电或高温运行环境下,其内部的动力电池可能会因为电解液分解而产生气体,导致电池外壳发生膨胀,如果不加干预,最终可能引发严重的热失控起火事故。在这项研究的模拟实验中,研究人员将压力传感器阵列倒置固定在模拟的亚克力电池保护壳上,并通过向内部的气球充气来模拟电池物理膨胀的过程。实验表明,当模拟电池发生仅仅约 2% 的初期轻微体积膨胀时,传感器阵列就立刻探测到了外壳压力的异常升高,并在软件监控界面触发了安全报警。这意味着,这项技术完全有潜力被部署在未来的电动汽车上,为驾乘人员提供至关重要的提前逃生或车辆检修时间。
4. 远程遥操作与力反馈:赋予机械手细腻的动作控制
为了检验传感器在实际机械控制中的表现,研究人员搭建了一套包含传感器、无线通讯模块和机械手的远程控制系统。在这个系统中,操作人员佩戴上装有传感器的特制手套,其手指的每一个弯曲动作都会被实时转化为数字信号,指挥远端的机械手完成完全同步的动作。
在图[4]展示的远程操作演示中,这只机械手展现出了极高的操作自由度。它不仅能够牢牢地握住刷子、刀具、螺丝刀和锤子等各种工具,并完成大角度的翻转动作,还能根据操作员的手势,精确地摆出特定的战术通讯手势,例如代表“我”、“明白”、“收到”以及“保持安静”、“狙击手”、“步枪”等复杂信号。

Figure 4
这套系统最核心的价值,在于为机械手加入了“力反馈”机制。研究人员在机械手的五根指尖上分别安装了覆有硅胶保护层的气凝胶传感器。在没有安装这种传感器的常规状态下,机械手尝试去抓取一块脆弱的内酯豆腐时,机械部件会直接收缩,导致豆腐瞬间破裂变形;但在开启了力反馈功能后,指尖的传感器会实时监测接触豆腐时的压力数值。一旦压力达到预先设定的安全上限,系统就会立刻指令电机停止继续施压。通过这种方式,机械手不仅能完好无损地夹起软豆腐,还能轻松、稳定地拿捏极其轻软的化妆粉扑、棉花团以及发酵过的熟馒头。
5. 结合人工智能:纯靠触碰精确分辨厨房食材
解决了机械手如何“轻拿轻放”的问题后,研究人员进一步探索了如何让机器通过触觉去“认识”世界。将新型压力传感器与机器学习算法相结合,使得机械手具备了仅靠触碰和按压就能分类物体的智能感知能力。
研究团队选择在厨房环境中进行了系统测试。如图[5]的数据分析所示,他们挑选了橘子、香蕉、面包、豆腐、黄瓜、梨、胡萝卜和苹果共 8 种常见的厨房食材。这 8 种食材各自的软硬程度和表面形状都有着明显的差异。当机械手的食指、中指、无名指和小拇指按照固定的程序去抓握这些食材时,由于遇到的机械阻力不同,四根手指上的传感器会输出包含细微差异的多组压力电信号。
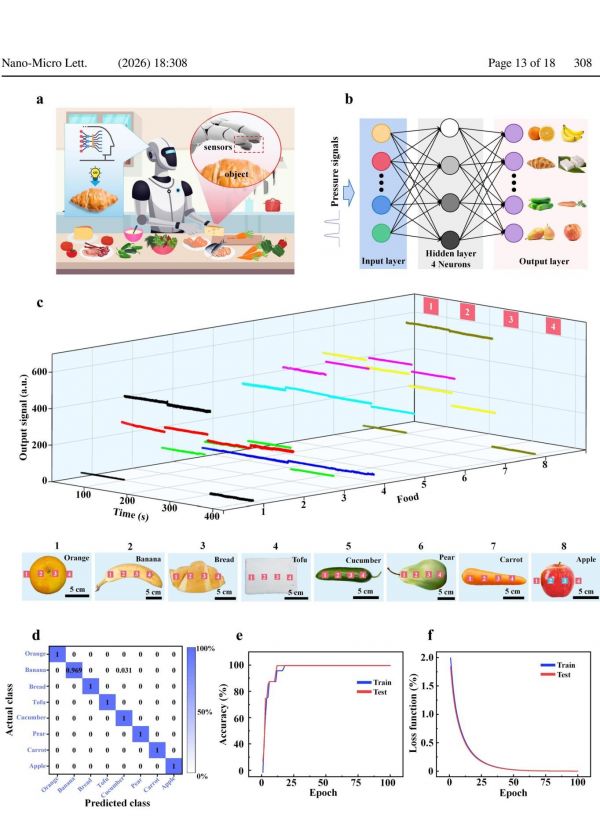
Figure 5
研究人员针对每种食材收集了 1000 组触觉数据,并将其导入到一种基础的人工智能模型中进行训练。测试结果令人振奋:计算机程序在仅仅经过 19 次的快速学习周期后,对于这 8 种食材的分类准确率就直接攀升并稳定在了 99.58%。系统输出的测试对比图清晰地显示,除了极少数状态相近的水果样本发生轻微误判外,机器几乎做到了全对分类。这表明,它已经成功学会了从海量的触觉信号中提取出各种食物的特有规律,实现了无需视觉辅助的精准物理识别。
未来展望
这项基于新型石墨烯材料的柔性压力传感器研究,不仅为解决机械抓取力度控制难题提供了一种低成本且高效的方案,也向我们展示了多模态感知技术的广阔前景。
通过对材料内部结构的简单调控,传感器在实现了极高灵敏度的同时确保了长期使用的抗压稳定性。从精确记录人体细微的生理脉搏,到监测大体积的新能源电池膨胀,再到结合人工智能实现高准确率的物体分类,其展现出的通用性令人瞩目。随着后续电子线路的进一步缩小和系统集成的完善,这种先进的触觉传感技术有望在不久的将来,被广泛应用于更智能的家庭陪护机器人、高度仿真的医用假肢,以及需要在复杂环境中执行精密操作的工业自动化设备中,极大地拉近人与机器之间的交互距离。
论文信息
标题:Graphene Aerogel-Based Flexible Pressure Sensor for Physiological Signal Detection and Human-Machine Interaction. 论文链接:https://doi.org/10.1007/s40820-026-02109-8 论文一键翻译:点击获取中文版 ➡️ 发表时间:2026-3-27 期刊/会议:Nano-micro letters 作者:Zihan Wang, Zeshang Zhao, Qiyang Tu, ..., Li Yang本文由超能文献“资讯AI智能体”基于4000万篇Pubmed文献自主选题与撰写,并经AI核查及编辑团队二次人工审校。内容仅供学术交流参考,不代表任何医学建议。
相关知识
2025中国医疗器械行业创新迭代分析:可穿戴设备与手术机器人的突破与前景
人工触觉:让机器“感知”世界的触感革命
一口牙=县城一套房!集采政策落地,“精准提升10倍”的种牙机器人能否破解难题?
突破与重构:医疗器械设计的创新之路
乔山Matrix商用健身器械:赋能力量美学,重塑健康体态
智能按摩机器人:开启精准理疗新时代
暴涨1000%!电子皮肤被疯炒!企业早已布局,产业链全面梳理 电子皮肤:机器人的新感知革命在科幻电影的想象里,人形机器人往往有着与人类相似的外观和触感,它们能精准地感知外界,与人类自...
养老机器人:助力老年人独立生活的智能新伙伴
手术机器人、人工智能……前沿科技开启精准医疗新时代
46万张图像训练,18种传感功能!Meta机器人手可以感知“触觉”了
网址: 破解机器人抓握破损难题:新型超轻压力传感器赋予机械手精准力觉与识物能力 https://m.trfsz.com/newsview1927819.html