智能医疗与辅助装置研究中心
Smart Healthcare and Assistive Device Research Center
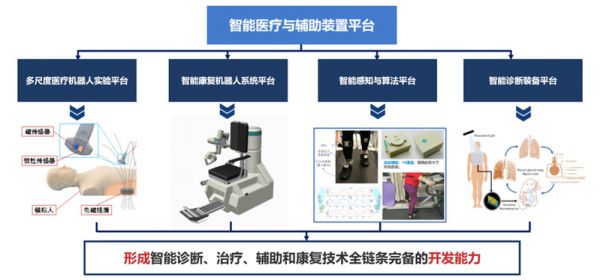
智能医疗与辅助装置研究中心旨在通过机器人、人工智能、数字孪生等交叉领域的深度融合,致力于智能诊断、治疗、辅助和康复技术的研发,开展包括医疗机器人、康复机器人、智能感知、智能诊断装备等领域的基础、工程和临床研究,建成具有国际影响力的智慧医疗研究团队。
中心围绕健康医疗问题日益复杂化的社会所面临的挑战,突破和解决医疗与辅助装置的科学问题与安全问题,研究内容包括上下肢康复机器人、医用磁控定位理论方法与技术、微纳机器、AI数据融合的医学诊断装备及多级数字孪生、人工肌肉合成及可穿戴动力服、电子皮肤与多模态信号融合等,通过创造创新的智能医疗与辅助装置解决方法,建立前沿的智能医疗与辅助装置技术集成平台,推动智慧医疗发展。
研究方向
医疗机器人医疗机器人定位、导航与控制
医用微纳机器人的驱动与控制
金人体内环境电磁传感与电磁运动追踪
智能感知与算法生理信号传感器及算法
纳米复合材料传感器
康复机器人上下肢康复训练机器人设计、制造与控制
脑机接口
软体假肢
基于柔性执行器的可穿戴外骨骼系统
智能诊断装备数字人AI模型
基于人工智能的疾病诊断系统
远程诊断机器人
科研平台
标志性项目与成果
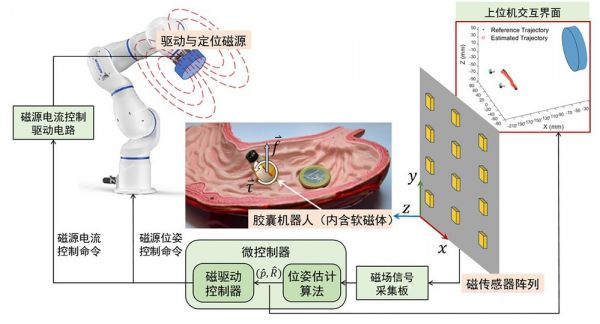
国家自然科学基金青年项目“基于软磁体的柔性医疗机器人六自由度位姿跟踪系统研究”
-
科学问题:
新型磁系统的磁-力-位耦合机理
新型磁定位与磁驱动原理
医疗机器人磁导航系统控制算法
研究目标:
针对多种磁定位和磁驱动系统提出通用的设计理论与方法
开发可实现灵巧驱动和精准操控的微创医疗机器人自主导航系统
创新点:
安全,无接触,不受遮挡影响
全六自由度磁定位与磁驱动
磁定位与磁驱动一体化设计
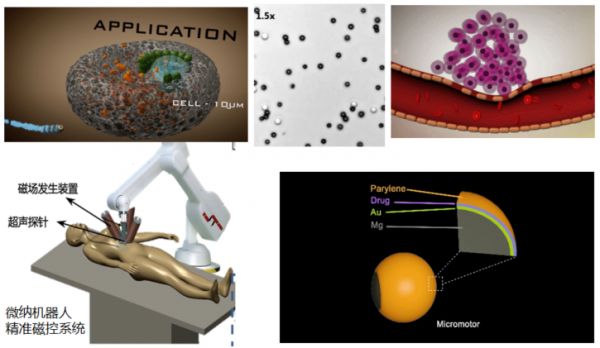
广东省区域联合基金项目 “光控化学能驱动微纳米马达多模式驱动下运动轨迹智能反馈控制的研究”
+
科学问题:
微纳机器人集群运动流场模型
微纳机器人主动趋向机制
研究目标:
实现微纳机器人的协同集群工作模式
实现微纳机器人体内导航系统及主动趋向治疗机制
创新点:
微纳机器人体内复杂环境下复合驱动
微纳机器人的主动趋向精准治疗
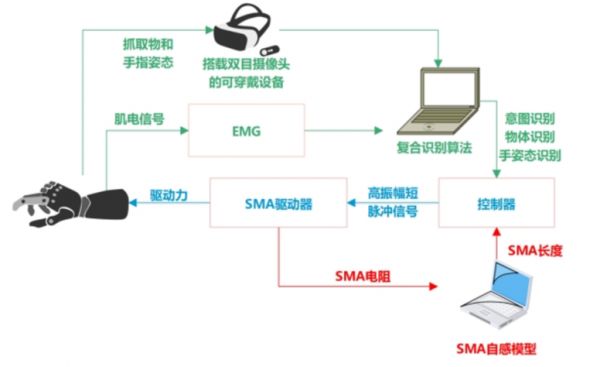
广州市基础与应用基础研究项目项目 “便携式软体人手康复外骨骼的设计方法”
+
科学问题:
新型柔性驱动器机理
多传感融合与识别算法
研究目标:
针对人手康复外骨骼系统提出驱动器的设计理论与方法
开发多传感融合的便携式人手康复外骨骼系统
创新点:
便携,贴身,安全
基于仿生性强的驱动器如SMA、人工肌肉
相关知识
人工智能与运动康复研究中心
智慧康养智能康复辅助器具项目可行性研究报告
CareVault 智能医疗研究云平台
人工智能也可“望闻问切” 辅助中医诊疗更便捷
智能医疗装备助力,“十四五”智慧医疗发展有哪些着力点?
卫健委、国务院、中华医学会新发文未来五年人工智能辅助医学影像
医疗智能体
运动健康智能装备湖北省工程研究中心
《中国听力健康报告2021》分报告:我国助听器、辅听装置技术与验配服务——现状及发展趋势
智能诊断、远程医疗,中国智慧医疗驶入快车道
网址: 智能医疗与辅助装置研究中心 https://m.trfsz.com/newsview526679.html