电刺激肛门直肠结构以治疗肛门功能障碍的系统和方法与流程
相关申请的交叉引用
本申请要求2012年2月21日提交的相同标题的美国专利申请号13/400,868的优先权。
本发明大体涉及用于电刺激胃肠道的方法和装置。更具体地,本发明涉及通过用电刺激直肠的粘膜下层、粘膜肌层或固有肌层或肛门括约肌来治疗肛门功能障碍的方法和装置。
背景
大便失禁指气体或液体粪便的无意识丧失(轻度失禁)或者固体粪便的无意识丧失(中重度失禁)。调查表明,大便失禁影响普通人群的2%和7%之间,然而真实的发生率可能高得多,原因是很多人不愿与医疗服务提供者讨论此问题。
轻度大便失禁同样地影响男性和女性,但报告中重度失禁的女性几乎是男性的两倍。大便失禁在老年人中也更为常见。其在私人疗养院的房客中特别常见,研究表明几乎全部房客的一半是失禁的。大便失禁可损害自信、使焦虑并且导致社会隔绝;然而大便失禁是能治疗的状况。治疗在大部分情况下可以减轻症状并且常常可以完全地治愈失禁。
自制需要下消化道和神经系统两者的正常功能。肛门括约肌连同围绕消化道末端的骨盆肌确保消化道内含物的受控性运动。这些是大便失禁的很多可能的原因。在大部分情况下,失禁由这些原因的某些组合造成。
三种类型的疗法通常用于大便失禁:药学疗法、生物反馈以及外科手术。药学疗法包括可以减少失禁的频率并且可以减少或消除粪漏发作的使粪变结实的药物和某些措施。常常,基本措施将改善轻度失禁,但控制泄漏的频率或剧烈的发作可能需要更积极的措施。促进大块粪便的膨胀物质可以通过增厚粪便帮助控制腹泻。甲基纤维素(一种纤维的形式)是常用的膨胀物质的一种类型。增加食用纤维也可以帮助使粪便凝聚成一团。抗腹泻的药物比如洛哌丁胺和地芬诺酯减少粪便的频率并且在治疗大便失禁中是有益的。洛哌丁胺还可以增加肛门括约肌的张力(紧固度)。当饭前服用时,抗胆碱能药物(比如处方药莨菪碱)通过减少结肠的收缩可以减少某些人群在饭后发生的失禁。
生物反馈是再训练肌肉的安全且无创伤性的方法。在生物反馈训练期间,传感器被用来帮助患者察觉并收缩帮助维持自制的肛门括约肌。这通常在医疗服务提供者或理疗学家的诊所完成。生物反馈可以是成功的,尽管结果可能是可变的。最可能得益于这种类型的疗法的人群是可以收缩肛门括约肌并且当其需要进行排便时有某些感觉的那些。生物反馈的效果在初始训练之后的六个月可能开始下降并且再训练可能是有用的。
骶神经电刺激可以消除40%至75%的肛门括约肌未受损伤的人群的泄漏。通过外科手术将电极插入靠近骶骨(腰部)中的神经。不完全清楚骶神经如何作用。此疗法是创伤性的,需要外科植入。某些患者由于手术产生并发症,包括疼痛、设备障碍、或感染,这些可能需要将设备移除或替换。目前,此疗法通常对用其它疗法未显示出改善结果的具有未受损伤的或修复好的肛门括约肌的人群保留。
肛门括约肌的电刺激涉及利用轻微的电流来刺激肛门括约肌收缩,所述收缩可以随着时间增强肌肉。利用小探针施加电流,患者将其插入直肠里面每天作用几分钟持续8至12周。对照试验表明,电刺激仅有适度的好处,可能由于增加肛区中的感觉;然而,此疗法不贵、非创伤性并且很少有副作用。然而,对于可被理解地可能不喜欢频繁插入刺激设备的患者,其可能是不舒服的。
一些不同的外科手术可以帮助减轻大便失禁。手术修补可以减少或解决失禁,特别对于分娩期间在肛门外括约肌中产生撕裂的女性以及由于外科手术或其它原因具有括约肌的损伤的人群。外科手术治愈了80%的具有分娩相关的括约肌撕裂的女性的大便失禁。
在具有不可修复的括约肌损伤的人群中,肌肉可以从身体的其它区域通常是腿或臀部转移,并且通过外科手术放置在肛管周围。这些肌肉模拟被损伤的括约肌的行为。肌肉转移手术可以修复最高达73%的具有其它方面的不可修复的损伤的人群的失禁。转移的肌肉的替代物是可以被膨胀以抑制粪便或被缩小以允许排便的人造肛门套。然而,此类型的操作仅在专业化的中心进行。并发症可能发生,即使当这些外科手术由专家进行。
结肠造口术是结肠在其中通过外科手术附至腹壁的外科手术。粪便被收集在紧密贴合皮肤的袋中。这消除粪便从直肠的泄漏。操作的变更可以允许人员控制肠排空。结肠造口术通常是在其他疗法已失败之后的最后一招。其也可以被视为用于对任何其它疗法不是候选的具有非耐受症状的人群。
用于电刺激的现有技术的系统和方法在统称意义上处理肛门括约肌,并且不区分内部和外部肛门括约肌刺激,这可能产生十分不同的生理学结果。肛门内括约肌是紧张收缩的光滑的肌肉,不是自主控制的,并且是通过粘膜下层的神经丛受神经支配的。肛门内括约肌维持括约肌的张力并且对疲劳有抵抗力。另一方面,肛门外括约肌是不是紧张收缩的骨骼肌,是自主控制的,并且是通过骶骨以及阴部神经受神经支配,提供自主控制给括约肌,其是非常易受疲劳影响的。静止压力主要通过肛门内括约肌提供,然而挤压压力通过外括约肌提供。
这因此将有利于用不同的刺激算法(stimulationalgorithm)或归因于其独特的生理机能和功能的不同的引线配置区别地刺激两种括约肌以阻止疲劳并且改善肌持久力。由于括约肌控制依靠多种机制,特别地关于能效、肌持久力以及疲劳问题,其有利于用不同的刺激算法刺激多种结构。为了用电刺激两种解剖结构,现有技术的系统和方法将需要至少两对刺激电极(即,至少两个微型器件或至少四根引线)。由于解剖的局限性,其可能难以调节或精确地放置多根引线到肛门括约肌中。然而,其将有利于安置一个电极在每个单独的结构中,从而利用较少的引线和/或微型器件以实现期望的刺激方案。
因此,存在对不需创伤性外科手术,从长远来看可以帮助减轻肛门失禁的症状的治疗的安全且有效的方法的需要。此外,不仅有对基于用于肛门失禁的治疗方法的电刺激的改良的设备的需要,也有对在身体中的任何预定位置能够实现这类设备的简单且迅速的配置的安全且最小程度创伤的方法和系统的需要。当前可得的大部分设备可用于外科或腹腔镜检查植入并且经受囊袋感染、引线移动或断裂的常见问题。此外,还有对用于在直肠或肛管内部植入微型器件的设备和方法的需要。
概述
在一个实施方案中,本说明书描述一种治疗患者的肛门直肠功能障碍的方法,包括以下步骤:提供至少包括可操作地连接至刺激发生器的第一电极和第二电极的设备;在患者的肛门直肠组织中植入所述设备;在患者的肛门直肠区内将所述第一电极设置成与第一靶向组织电连通;在患者的肛门直肠区内将所述第二电极设置成与第二靶向组织电连通,其中所述第二靶向组织与所述第一靶向组织是有区别的且不同的;以及使所述刺激发生器产生第一刺激算法和第二刺激算法,其中所述第一刺激算法通过所述第一电极将第一电刺激发送至所述第一靶向组织,并且所述第二刺激算法通过所述第二电极将第二电刺激发送至所述第二靶向组织。
在一个实施方案中,所述第一靶向组织和所述第二靶向组织选自以下中的任何一个:直肠的纵肌、直肠的环肌、直肠的黏膜肌层、直肠的粘膜下层、阴部神经或阴部神经的分支、联合纵肌、肛门外括约肌的浅部或深部、肛门内括约肌、肛管的黏膜肌层、浆膜下丛、纵肌内丛(longitudinalintramuscularplexus)、环肌内丛(circularintramuscularplexus)、腺周丛、肠肌(auerbach)丛或肛门直肠的粘膜下(meissner)丛。
在一个实施方案中,所述第一刺激算法和所述第二刺激算法是可编程的并且产生脉冲串,其中所述脉冲串在每脉冲串的脉冲数目、脉冲串中的脉冲的形状、脉冲串重复之间的间隔、每个脉冲的持续时间、每个串中的脉冲的时序(timing)和振幅、将提供的期望的安培量或电势量以及每个串的形状方面是可变的,其中形状选自以下中的任何一种:正方形、矩形、正弦曲线或锯齿形。
在一个实施方案中,所述第一刺激算法与所述第二刺激算法是相同的。在另一实施方案中,所述第一刺激算法与所述第二刺激算法是不同的。
在一个实施方案中,其中第一和第二刺激算法是相同的,在一个电极起去极化电极的作用并且另一电极起超极化电极的作用时,相同的刺激算法被通过每个电极递送。在一个实施方案中,当想要刺激肛门内括约肌时,邻近肛门内括约肌的电极将是去极化的电极。在一个实施方案中,当想要刺激肛门外括约肌时,邻近肛门外括约肌的电极将是去极化的电极并且可选的电极将是超极化的电极。
在一个实施方案中,其中第一刺激算法与第二刺激算法不同,第一刺激算法被设计为主要地调节肛门内括约肌的功能,而第二刺激算法被设计为主要地调节肛门外括约肌的功能。在一个实施方案中,第一刺激算法被连续不断地或以规律的间隔递送,而第二刺激算法根据需要被间歇地递送。在一个实施方案中,第一刺激算法被编程到设备中以自动地递送至患者,而第二刺激算法利用外部输入由患者递送。
在一个实施方案中,所述设备还包括至少一个传感器,其中所述传感器探测至少一个参数,而且其中通过所述传感器获得的数据被用来修改所述第一刺激算法和/或所述第二刺激算法。在一个实施方案中,所述传感器包括压力传感器、电活动传感器、阻抗传感器、加速计或测斜计。在另一实施方案中,传感器包括内部压力传感器,其中患者启动肛门挤压力,而且其中所述挤压力通过所述内部压力传感器被感测,导致所述设备递送特定用于肛门外括约肌的刺激以提高肛门外括约肌的张力。
在一个实施方案中,所述设备还包括设计为由所述患者操作的外部控制器,其中患者能够修改和激活所述第一刺激算法和/或所述第二算法。
在一个实施方案中,设备基于患者的临床症状、直肠测压数据或其它临床或调查研究的数据被编程以为患者特定的刺激算法编制程序。
在一个实施方案中,说明书描述用于治疗患者的肛门直肠功能障碍的设备,包括:包括用于通过电感耦合、射频(rf)耦合、电耦合、磁耦合、光耦合或其它电磁耦合接收并且传输来自患者的身体外部的数据和/或功率的收发器的微控制器;用于解码以及储存多个刺激参数并且产生多个刺激脉冲的集成电路(ic)芯片;以及用于储存数据集、刺激以及控制参数的可编程的存储器;刺激发生器;电源;以及用于植入肛门直肠组织内并刺激肛门直肠组织的至少两个电极。
在一个实施方案中,用于治疗患者肛门直肠功能障碍的设备还包括如上所述的至少一个传感器。在一个实施方案中,设备还包括用来使设备固定在直肠或肛管中的至少一个锚固件。在一个实施方案中,设备还包括设计为由如上所述的所述患者操作的外部控制器。
在一个实施方案中,本说明书描述用于在肛门直肠中植入微型器件的导管设备,包括:具有近侧开口端和远侧开口端的长形的护套;在所述护套内可滑动地移动的包括近端和远端的长形的推进器(pusher);邻近所述远端的弯管(sharpbend);以及用于在其远端,在所述弯管的远侧附接所述微型器件的附接点。
在一个实施方案中,本说明书描述用于协助肛门直肠中植入微型器件的设备,包括:包括远端和近端的圆锥形的远侧部分,其中所述远端具有比所述近端小的直径;用于捕捉肛门直肠组织的一部分的长方形槽;在所述远端的开口;以及覆盖在所述远端处的所述开口的可移动的阀;包括远端和近端的圆柱形的近侧部分,其中所述远端被附接至所述远侧部分的所述近端并且与所述远侧部分的所述近端敞开连通;以及手柄;用于在所述设备中产生真空的装置,所述真空吸入肛门直肠组织的一部分穿过槽并且进入远侧部分;以及用于导管或针通过的延伸穿过所述近侧部分并且进入所述远侧部分的通道。在一个实施方案中,用于产生真空的装置包括插入到插入设备的近侧部分的近端并且在插入设备的近侧部分之中可滑动移动的柱塞。在另一实施方案中,用于产生真空的装置包括应用至插入设备的近侧部分的近端的吸力。
在一个实施方案中,本说明书描述用于在患者的肛门直肠区中植入微型器件的方法,包括以下步骤:提供插入设备,所述插入设备包括:包括远端和近端的圆锥形的远侧部分,其中所述远端具有比所述近端小的直径;用于捕获肛门直肠组织的一部分的长方形槽;在所述远端的开口;以及覆盖在所述远端处的所述开口的可移动的阀;包括远端和近端的圆柱形的近侧部分,其中所述远端被附接至所述远侧部分的所述近端并且与所述远侧部分的所述近端敞开连通;以及手柄;用于在所述设备之中产生真空的装置,所述真空吸入肛门直肠组织的一部分穿过槽并且进入远侧部分;以及用于导管或针通过的延伸穿过所述近侧部分并且进入所述远侧部分的通道;提供导管,所述导管包括:具有近侧开口端和远侧开口端的长形的护套;在所述护套内可滑动移动的包括近端和远端的长形的推进器;邻近所述远端的弯管;以及用于在其远端,在所述弯管的远侧附接所述微型器件的附接点;将所述插入设备插入患者的直肠内;利用所述产生真空的装置在所述插入设备中产生真空并且吸入肛门直肠组织的一部分进入所述插入设备内;将所述导管插入到所述插入设备的所述通道内;延伸具有附接的微型器件的所述推进器越过所述护套的远侧开口端,使所述弯管部分地展开;将所述推进器拉回到所述护套内,使所述微型器件与所述肛门直肠组织接合;将所述推进器完全地缩进所述护套内,使所述微型器件脱离所述推进器并且保持在所述肛门直肠组织中;使所述真空装置脱离以释放真空并且释放肛门直肠组织的所述部分;以及从患者的直肠移除所述插入设备。
在一个实施方案中,本说明书描述用于治疗患者的肛门直肠功能障碍的系统,包括:至少一个电子医疗设备,所述电子医疗设备包括微控制器,所述微控制器包括用于通过电感耦合、射频(rf)耦合、电耦合、磁耦合、光耦合或其它电磁耦合接收并且传输来自患者的身体外部的数据和/或功率的收发器;用于解码以及储存多个刺激参数并且产生多个刺激脉冲的集成电路(ic)芯片;以及用于储存数据集、刺激以及控制参数的可编程的存储器;刺激发生器;电源;以及用于肛门组织内的植入以及肛门组织的刺激的至少两个电极;用于植入所述电子医疗设备的导管,所述导管包括:具有近侧开口端和远侧开口端的长形的护套;在所述护套内可滑动移动的包括近端和远端的长形的推进器;邻近所述远端的弯管;以及用于在其远端,在所述弯管的远侧附接所述微型器件的附接点;以及用于协助所述植入的插入设备,所述插入设备包括:包括远端和近端的圆锥形的远侧部分,其中所述远端具有比所述近端小的直径;用于捕获肛门直肠组织的一部分的长方形槽;在所述远端处的开口;以及覆盖在所述远端处的所述开口的可移动的阀;包括远端和近端的圆柱形的近侧部分,其中所述远端被附接至所述远侧部分的所述近端并且与所述远侧部分的所述近端敞开连通;以及手柄;用于在所述设备之中产生真空的装置,所述真空吸入肛门直肠组织的一部分穿过槽并且进入远侧部分;以及用于导管或针通过的延伸穿过所述近侧部分并且进入所述远侧部分的通道。
在一个实施方案中,本说明书涉及调节患者的肛门内括约肌的功能的方法,包括以下步骤:提供至少包括可操作地连接至刺激发生器的第一电极和第二电极的设备;在患者的肛门直肠组织中植入所述设备;在患者的肛门直肠区内将第一电极设置成与第一靶向组织电连通;在患者的肛门直肠区内将第二电极设置成与第二靶向组织电连通,其中所述第二靶向组织是与所述第一靶向组织相同的或有区别的并且不同的;以及使所述刺激发生器产生刺激,其中所述刺激适合于调节持续到这种刺激的中断之后的肛门内括约肌的功能。在一个实施方案中,肛门内括约肌的功能的调节在刺激的中断之后持续至少5分钟。
在一个实施方案中,本说明书涉及调节患者的肛门内括约肌的功能的方法,包括以下步骤:提供至少包括可操作地连接至刺激发生器的第一电极和第二电极的设备;在患者的肛门直肠组织中植入所述设备;在患者的肛门直肠区内将第一电极设置成与第一靶向组织电连通;在患者的肛门直肠区内将第二电极设置成与第二靶向组织电连通,其中所述第二靶向组织是与所述第一靶向组织相同的或有区别的并且不同的;以及使所述刺激发生器产生刺激,其中所述刺激适合于调节肛门内括约肌的功能并且其中肛门内括约肌功能的这种调节通过直肠扩张进一步被调节。在一个实施方案中,通过直肠扩张进行的肛门内括约肌功能的额外的调节导致由于刺激引起的所述功能的初始调节的至少10%的增加或减少。
在另一实施方案中,本发明公开治疗患者的肛门直肠功能障碍的方法,包括以下步骤:在患者的肛门直肠组织中植入至少包括可操作地连接至电刺激发生器的第一电极和第二电极的设备,其中所述肛门直肠组织包括第一靶向组织和第二靶向组织并且其中所述第一靶向组织与所述第二靶向组织是有区别的且不同的;使所述刺激发生器通过所述第一电极递送第一电脉冲至第一靶向组织;以及使所述刺激发生器通过所述第二电极递送第二电脉冲至第二靶向组织。任选地,第一电极物理地接触第一靶向组织并且其中第二电极物理地接触第二靶向组织。
任选地,第一靶向组织和所述第二靶向组织是以下的至少一种:直肠的纵肌、直肠的环肌、直肠的黏膜肌层、直肠的粘膜下层、阴部神经或阴部神经的分支、联合纵肌、肛门外括约肌的浅部或深部、肛门内括约肌、肛管的黏膜肌层、浆膜下丛、纵内肌丛、环内肌丛、腺周丛、肠肌(auerbach)丛或肛门直肠的粘膜下(meissner)丛。任选地,刺激发生器能够产生脉冲串并且其中以下参数的至少一个是可编程的:每脉冲串的脉冲数目、脉冲串之间的间隔、每个脉冲的持续时间、每个串中的脉冲的时序和振幅、脉冲中期望的安培量或电势量或脉冲串中的脉冲的形状,其中形状选自以下中的任何一种:正方形、矩形、正弦曲线或锯齿形。
任选地,刺激发生器按照第一刺激算法产生第一电脉冲并且所述刺激发生器按照第二刺激算法产生第二电脉冲。任选地,第一电极起去极化电极的作用并且所述第二电极起超极化电极的作用。任选地,去极化电极被放置在邻近患者的肛门内括约肌处,用于刺激所述肛门内括约肌。
任选地,去极化电极被放置在邻近患者的肛门外括约肌处以便刺激所述肛门外括约肌。任选地,第一刺激算法与所述第二刺激算法不同。任选地,第一刺激算法被配置为调节患者的肛门内括约肌的功能并且所述第二刺激算法被配置为调节患者的肛门外括约肌的功能。
任选地,第一刺激算法使第一电脉冲被连续地或以规律的间隔递送并且所述第二刺激算法使第二电脉冲以不规律的间隔或根据需要被递送。任选地,第一刺激算法被编程到设备中使得第一电脉冲在没有患者干预的情况下被递送并且所述第二电脉冲通过外部输入由患者手动递送。
任选地,第一刺激算法基于患者的临床症状或直肠测压数据被编程并且保存于所述设备的存储器中。任选地,设备还包括至少一个传感器,其中所述传感器探测至少一个参数,并且其中通过所述传感器获得的数据被用来修改所述第一刺激算法和/或所述第二刺激算法。
任选地,传感器包括压力传感器、电活动传感器、阻抗传感器、加速计或测斜计中的至少一种。任选地,传感器包括内部压力传感器,内部压力传感器被配置为使得当患者启动肛门挤压力时,所述挤压力通过所述内部压力传感器被感测并且使所述设备递送电脉冲至患者的肛门外括约肌以提高肛门外括约肌的张力。任选地,设备还包括被配置为由所述患者操作的外部控制器并且其中外部控制器适合于修改或激活所述第一刺激算法或所述第二刺激算法中的至少一个。
在另一实施方案中,本说明书公开调节患者的肛门内括约肌的功能的方法,包括以下步骤:植入刺激发生器,其中所述刺激发生器被可操作地连接至第一电极和第二电极;将所述第一电极植入在第一靶向组织内部,其中所述第一靶向组织是患者的肛门直肠区的一部分;将所述第二电极植入在第二靶向组织内部,其中所述第二靶向组织是患者的肛门直肠区的一部分;以及使所述刺激发生器产生刺激,其中所述刺激适合于调节肛门内括约肌的功能。
任选地,调节适合于持续超出这种刺激的中断。第二靶向组织与第一靶向组织是相同的或有区别的并且不同的。调节在刺激的中断之后持续至少5分钟。肛门内括约肌功能的调节通过直肠扩张被进一步调节。通过直肠扩张进行的肛门内括约肌功能的额外的调节导致因刺激引起的所述功能的调节的至少10%的增加或减少。
本说明书的上述的以及其它的实施方案将在附图以及以下提供的详细描述中被更深度地描述。
附图说明
当结合以相同的参考数字表示全部的相应部件的附图阅读时,本说明书的这些以及其它的目的和优势将从以下的详细描述变得更加完全明显。其中:
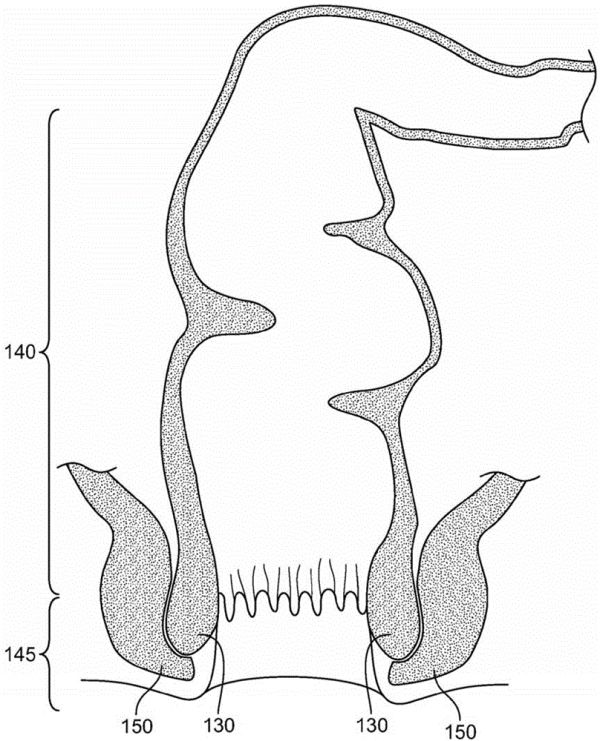
图1是直肠以及肛管的横截面图;
图2是下段直肠以及肛管的一侧的肌肉系统的横截面图;
图3是描述直肠以及肛管的壁中的神经丛的下段结肠的剖面图;
图4是根据本发明的一个实施方案的示例性的可编程可植入的电子医疗微型器件的示意图;
图5是植入肛门内括约肌以及肛管的黏膜肌层中的微型器件的示例性的电极组的一个实施方案的图示;
图6是植入肛门外括约肌的浅部和深部以及植入肛门内括约肌中的微型器件的示例性电极组的一个实施方案的图示;
图7是植入直肠的环肌、肛门内括约肌中以及邻近阴部神经的分支的微型器件的示例性电极组的一个实施方案的图示;
图8是植入直肠的粘膜下层以及植入阴部神经的分支中的微型器件的示例性电极组的一个实施方案的图示;
图9是植入直肠的环肌以及植入阴部神经的分支中的微型器件的示例性电极组的一个实施方案的图示;
图10是植入直肠的环肌以及植入肛门外括约肌的浅部和深部中的微型器件的示例性电极组的一个实施方案的图示;
图11是植入直肠的环肌以及植入肛门内括约肌中的微型器件的示例性电极组的一个实施方案的图示;
图12a是描述将插入设备的柱塞向下拉动以产生真空从而吸入肛门直肠组织的一部分的步骤的示例性插入设备的一个实施方案的图示;
图12b是描述吸入到设备中的肛门直肠组织的一部分的图12a中的示例性插入设备的相同实施方案的自上而下的视图(top-downview)图示;
图12c是描述将插入设备的柱塞向上推动以脱离肛门直肠组织的步骤的图12a中的示例性插入设备的相同实施方案的图示;
图13a是带推进器的植入导管以及在所述导管内被布置为显著的相互平行的附接的微型器件的示例性结构的一个实施方案的图示;
图13b是描述利用推进器使微型器件被推出所述导管的图13a中的植入导管的示例性结构的相同实施方案的图示;
图13c是描述微型器件被完全推出所述导管的图13a中的植入导管的示例性结构的相同实施方案的图示;
图13d是描述推进器被拉回所述导管中的图13a中的植入导管的示例性结构的相同实施方案的图示,;
图13e描述推进器被完全地拉回所述导管内从而脱离被植入在组织部位的微型器件的图13a中的植入导管的示例性结构的相同实施方案的图示;
图14a是描述放置在靠近患者的肠黏膜的所述导管的植入导管的示例性结构的实施方案的图示;
图14b是描述微型器件被推出导管以便植入的步骤的图14a中的植入导管的示例性结构的相同实施方案的图示;
图14c是描述由于弯曲部分的笔直化,微型器件被配置在组织部位更深处的图14a中的植入导管的示例性结构的相同实施方案的图示;
图14d是描述在组织部位处释放微型器件之后,导管被拉开的步骤的图14a中的植入导管的示例性结构的相同实施方案的图示;
图15是用于微型器件递送的被放置在患者的肛门直肠区中的示例性插入设备的一个实施方案的图示;
图16是植入在肛门直肠的粘膜下层的具有附接的电极组的微型器件的一个实施方案的图示;
图17是描述利用皮下针在女性患者中植入微型器件的方法的本说明书的一个实施方案的图示;
图18是根据本说明书的一个实施方案,描述通过肛门内括约肌(ias)和肛门外括约肌(eas)的示例性选择性刺激获得的代表性的压力曲线的图;
图19a是具有包括阳极和包括阴极的中心电极的端电极的微型器件的一个实施方案的图示;
图19b是具有包括阴极和包括阳极的中心电极的端电极的微型器件的一个实施方案的图示;以及
图19c是具有包括阳极和阴极以及包括没有极性的中心电极的端电极的微型器件的一个实施方案的图示。
具体实施方式
本说明书涉及用于治疗包括大便失禁和便秘的各种肛门直肠的神经肌肉紊乱的可编程的、可植入的电子医疗设备。本说明书的电子医疗设备采用以最小的创伤被植入在肛门直肠区中的可植入的微型刺激器或无需借助仪器看的刺激器(macrostimulator)。在一个实施方案中,每个微型刺激器包括用来递送电刺激到至少两个单独的靶向组织的至少两个电极。在一个实施方案中,电子医疗设备包括在中间的共用阳极或阴极以及在每一端的两个单独的电极,每一个具有与中心电极相反的极性。在另一实施方案中,设备仅具有两个电极,其中刺激电极基于待刺激的期望的区被选择。在各种实施方案中,电子医疗设备被植入粘膜、粘膜下层或肛门直肠区的固有肌层内。优选地,电子医疗设备被植入直肠的粘膜下层内。直肠的粘膜下层是低阻抗的层并且是易于接近的,且所涉及的植入风险和创伤最低。在电子医疗设备植入之后,电极在内视镜下或通过外科手术被传往每个特定的靶向组织。在一个实施方案中,电极利用比如形状记忆的技术被设计以允许适当的结构。电极的不同的长度、形状或结构将使得其更适合于邻近期望的靶向组织。第一电极被植入第一靶向组织内或邻近第一靶向组织并且第二电极被植入第二靶向组织内或邻近第二靶向组织。在一个实施方案中,靶向组织包括在肛门直肠区中的肌肉和神经。在各种实施方案中,靶向组织包括直肠的纵肌、直肠的环肌、直肠的黏膜肌层、直肠的粘膜下层、阴部神经或阴部神经的分支、联合纵肌、肛门外括约肌的浅部或深部、肛门内括约肌、肛管的黏膜肌层、浆膜下丛、纵内肌丛、环内肌丛、腺周丛、肠肌(auerbach)丛或肛门直肠的粘膜下(meissner)丛。肛门外括约肌的皮下部分位于邻近皮肤的位置并且具有与覆盖的皮肤重叠的神经支配的神经。因此,理想情况是肛门外括约肌的皮下部分的刺激被减到最少或避免使与刺激相关的感觉减到最少。
本说明书还涉及用于治疗包括大便失禁和便秘的各种肛门直肠的神经肌肉紊乱的刺激两个单独的肛门直肠组织的系统和方法。在各种实施方案中,两个靶向组织利用相同的或不同的刺激算法同时地或在不同的时间被选择性地刺激。
例如,在一个实施方案中,第一电极被植入肛门内括约肌中并且第二电极被植入肛门外括约肌中。肛门内括约肌具有被连续不断地施加的第一刺激水平。同时,肛门外括约肌具有根据需要被施加的第二刺激水平。用相同的或不同的刺激算法刺激多个靶向组织改善肛门直肠的功能并且提高了能效,同时避免了在现有技术中遇到的疲劳和持久力问题。此外,由于单独的靶向结构可以通过不同的算法而不是从不同的电极和设备接收不同的刺激,因而需要较少的设备和电极。例如,短的持续时间(200微秒)、高频(20hz)脉冲可以更适合于刺激肛门内括约肌以增强张力,而长的持续时间(300毫秒)、低频(5周/秒)脉冲可能更适合于刺激肛门外括约肌。因此,提供这些不同的脉冲在不同的时间穿过相同的电极可以实现维持自制的期望的临床效应。
本说明书还涉及用于植入电子医疗设备的导管。在一个实施方案中,导管包括护套和电子医疗设备被附接至其的推进器。推进器具有邻近其远端的弯管。推进器被延伸越过在护套的远端的开口,允许弯管部分地展开并且暴露电子医疗设备。推进器然后被缩回到护套内,将电子医疗设备推进肛门直肠组织内。当推进器被完全地缩入护套内时,电子医疗设备脱离其远端。
本说明书还涉及用于协助导管的递送以及电子医疗设备的植入的插入设备。在一个实施方案中,插入设备包括圆锥形的远侧部分和圆柱形的近侧部分。在一个实施方案中,可移动的阀覆盖在远侧部分的远端处的开口。远侧部分包括用于捕获肛门直肠组织的一部分的槽。在一个实施方案中,柱塞在近侧部分内是可滑动移动的并且被用来产生真空并且吸入肛门直肠组织的一部分穿过槽并且进入远侧部分。可选地,在另一实施方案中,施加利用泵的外部抽吸以接合肛门直肠组织。如上所述的导管然后被用来植入电子医疗设备。
本发明涉及多个实施方案。为了使本领域的技术人员能够实施本发明,提供以下公开内容。在此说明书中使用的语言不应该理解为任一特定实施方案的一般否定或不应该用来限制权利要求超出在其中使用的术语的意义。本文定义的一般原则可以适用于其他的实施方案和应用,而并不背离本发明的精神和范围。而且,所使用的术语和措辞是为了描述示例性实施方案的目的而不应该被视为限制。因此,本发明将被给予与所公开的原则和特征一致的包含许多可选方案、修改以及等同物的最宽的范围。为了清楚的目的,与本发明有关的关于本技术领域中已知的技术材料的详细资料未被详细描述以免不必要地使本发明模糊不清。
本领域的技术人员将理解,包括自制的正常的肛门直肠功能是需要肛门括约肌肌肉系统的无意识的(潜意识的)控制和自主的(有意识的)控制两者的复杂的机制。图1是阐释了直肠140和肛管145的横截面图。图2是阐释了下段直肠240和肛管245的一侧的肌肉系统的横截面图。图3是描述在直肠和肛管的壁中的神经丛360、370的下段结肠的剖面图。现在同时谈及图1直至图3,肛门内括约肌130、230是无意识控制下的平滑肌,通过在肠壁中的粘膜下(meissner)神经丛360和肠肌(auerbach)神经丛370受神经支配,并且是括约肌的静息张力的原因。肛门外括约肌150、250是自主控制下的骨骼肌,通过第四骶神经的会阴分支和低级直肠神经受神经支配,并且是括约肌的挤压压力和自发张力的原因。在图2中可以看出,肛门外括约肌还被地分成深部250a、浅部250b和皮下250c组分。由于其平滑肌组分,肛门内括约肌130、230不易于疲劳并且可以产生长的持续时间的低水平压力。在另一方面,肛门外括约肌150、250是骨骼肌并且因此可以产生短的持续时间的高的自发压力。然而,其容易在几分钟内疲劳并且不能维持持续的高张力。
本说明书的电刺激治疗方法理解,内和外部肛门括约肌是结构组织上以及功能上有区别的并且为了最佳功能需要差别刺激。肛门内括约肌需要延长的刺激以维持基础的张力并且阻止粪便和黏液从肛门渗漏。由于正常的排便即使在连续的内括约肌刺激的存在下也可以被实现,排便的感测以及肛门内括约肌刺激的抑制是不必要的。肛门外括约肌需要刺激的短脉冲以产生挤压压力来克服排便的冲动。本说明书通过对每个靶向组织提供不同的刺激算法解决了将导致疲劳和疼痛的肛门外括约肌的连续的或延长的刺激的问题。
在一个实施方案中,当一个电极起去极化电极的作用并且另一电极起超极化电极的作用时,相同的刺激算法通过每个电极被递送。当需要刺激肛门内括约肌时,邻近肛门内括约肌的电极将是去极化电极。当需要刺激肛门外括约肌时,邻近肛门外括约肌的电极将是去极化电极并且可选的电极将是超极化电极。
在一个实施方案中,其中一种刺激算法是与另一刺激算法不同的,第一刺激算法被设计为主要调节肛门内括约肌的功能,而第二刺激算法被设计为主要调节肛门外括约肌的功能。在一个实施方案中,第一刺激算法被连续地或以规律的间隔递送,而第二刺激算法根据需要被间歇地递送。在一个实施方案中,第一刺激算法被编程到设备中以被自动递送至患者并且第二刺激算法利用外部输入由患者递送。
在一个实施方案中,两个或更多个刺激算法可以起到不同的作用。例如,用来提高肌肉张力的刺激算法可以与阻隔脉冲算法结合以阻止由患者的直肠或肛管引起的感觉,以阻止患者排便的冲动。
粘膜下层空间是包括疏松结缔组织和粘膜下层(meissner)神经丛360的低阻抗空间。因此,根据本说明书的方面,粘膜下层空间被认为对微型器件的安全植入以及对具有更节能的算法的刺激是容易实现的。
图4是根据本发明的一个实施方案的示例性的可编程可植入的电子医疗微型器件400的示意图。微型器件400包括刺激器或波形发生器405、微控制器410、任选的传感器模块415以及电源420,所有都并入到单一的设备用于简单且快速地配置在患者的肛门直肠区内。刺激器405、微控制器410以及传感器模块415能够利用有线或无线通信互相通讯。
参考图4,微型器件400包括生物相容的密封材料比如玻璃、陶瓷、聚合物、钛或对本领域的技术人员明显的任何其它合适的材料的外壳402。在一个实施方案中,微控制器410包括通过电感耦合、射频(rf)耦合、电耦合、磁耦合、光耦合或其它电磁耦合用于接收和传输来自患者的身体外部的数据和/或功率的收发器;用于解码以及储存多个刺激参数并且产生多个刺激脉冲的集成电路(ic)芯片;以及用于储存数据集、刺激以及控制参数的可编程存储器。可编程的存储器允许刺激和控制参数通过电感耦合、射频(rf)耦合或其它电磁耦合针对每个单独的患者被调整至安全、有效并且最小化不适感的设置。
刺激器或波形发生器405是能够产生多个期望的电脉冲以便刺激患者的肛门直肠区中合适的神经和/或肌肉的电生理刺激器。刺激器405产生由微控制器410指示的多个刺激脉冲串。在一个实施方案中,脉冲串是可编程的并且其特征可以以以下方式不同:脉冲串中的脉冲数目;脉冲串中的脉冲的形状;脉冲串重复的间隔;每个脉冲的持续时间;串中脉冲的时序和振幅;以及被提供的期望的安培量或电势量,这取决于患者的状况和需要。而且,电刺激可能具有产生期望结果所必需的任何形状,包括正方形、矩形、正弦曲线或锯齿形。在一个实施方案中,期望的刺激脉冲通过多个刺激电极425被递送。
在一个实施方案中,刺激利用在患者的身体之外的与本领域的技术人员已知的用于心脏起搏器的远距离发射机类似的发送器由患者触发。在一个实施方案中,发送器是外部手持设备。
在一个实施方案中,电源包括通过合适的装置比如rf链耦合至微型器件400的外部电源。在另一实施方案中,电源包括利用能量的产生或存储的任何合适的装置的独立电源420,比如一次电池、可补充能量的或可充电电池比如锂离子电池、电解质电容器等等。
在一个实施方案中,任选的传感器模块415利用多个感测电极422探测多个生理参数比如压力、电活动和阻抗。在另一实施方案中,任选的传感器模块415包括加速计以探测患者位置的变化。在一个实施方案中,任选的传感器模块415包括测斜计。由任选的传感器模块415收集的信息被用来触发刺激和/或不时地修改刺激时序。
在另一实施方案中,患者可以进行通过内部传感器感测的操纵以递送特定的刺激。例如,患者可以启动通过内部压力传感器感测的挤压力以为肛门外括约肌递送刺激来提高肛门外括约肌张力。
在一个实施方案中,微型器件400还包括能够将微型器件400锚固至患者的肛门直肠区中的合适位置的锚固件428。锚固元件428通过连接件427固定至微型器件400。在一个实施方案中,连接件427在配置之后收缩,将微型器件400拉入特定位置更深处或与壁紧贴,从而提供更好的滞留。
在一个实施方案中,多个刺激电极425和感测电极422由导电陶瓷、导电聚合物和/或贵或难熔金属构成。本领域的技术人员应理解,取决于应用、位置或期望的生理刺激,电极可以被用作感测电极以及刺激电极两者。在各种实施方案中,感测电极422和锚固件428或刺激电极425和锚固件428可以是相同的元件。还有一些实施方案中,相同的元件可以被用作刺激电极425、感测电极422以及锚固件428。
根据本说明书的治疗方法的一个实施方案,刺激脉冲按照以下参数被递送:
频率=1cpm-100hz;
振幅=1μamp-100mamp;
脉冲宽度=1毫秒-1秒;以及
占空比﹤100%
根据一个实施方案,治疗方案包括用开启刺激循环和停止刺激循环连续地治疗。例如肛管的黏膜肌层和肛门内括约肌用开启刺激循环和停止刺激循环被连续地治疗。在一个实施方案中,开启刺激循环是1毫秒-23小时并且停止刺激循环是1毫秒-23小时。
图5是植入肛门外括约肌530和肛管的黏膜肌层535中的微型器件500的示例性的电极组525、526的一个实施方案的图示。微型器件500被植入使得第一电极525为邻近肛门内括约肌530并且第二电极526为邻近肛管545的黏膜肌层535。
图6是植入肛门外括约肌的浅部650和深部651以及肛门内括约肌630中的微型器件600的示例性电极组625、626、627的一个实施方案的图示。微型器件600被植入使得两个第一电极626、625为分别邻近肛门外括约肌的浅部650和深部651,同时第三电极627为邻近肛门内括约肌630。
图7是植入直肠741的环肌、肛门内括约肌730中并且邻近阴部神经747的分支的微型器件700的示例性电极组725、726、729的一个实施方案的图示。微型器件700被植入使得第一电极725为邻近直肠741的环肌层,而第二电极726为邻近肛门内括约肌730。第三电极729被放置在邻近阴部神经747的分支的位置。
图8是植入直肠836的粘膜下层以及阴部神经847的分支中的微型器件800的示例性电极组825、826的一个实施方案的图示。微型器件800被植入使得第一电极825为邻近直肠836的粘膜下层,而第二电极826为邻近阴部神经847的分支。
图9是植入直肠941的环肌以及阴部神经947的分支中的微型器件900的示例性电极组925、926的一个实施方案的图示。微型器件900被植入使得第一电极925为邻近直肠941的环肌层,而第二电极926为邻近阴部神经947的分支。
图10是植入直肠1041的环肌以及肛门外括约肌的浅部1050和深部1051中的微型器件1000的示例性电极组1025、1026、1029的一个实施方案的图示。微型器件1000被植入使得第一电极1025为邻近直肠1041的环肌层,而第二电极1026为邻近肛门外括约肌的浅部1050并且第三电极1029为邻近肛门外括约肌的深部1051。
图11是植入直肠1141的环肌以及肛门内括约肌1130中的微型器件1100的示例性电极组1125、1126的一个实施方案的图示。微型器件1100被植入使得第一电极1125为邻近直肠1141的环肌层并且第二电极1126为邻近肛门内括约肌1130。
为了促进微型器件快速、容易且舒适地植入,本说明书还提供插入设备和导管。图12a到12c描述插入设备1200的实施方案的各种结构。图12a是描述将插入设备的柱塞1204向下拉动以产生真空并且吸入肛门直肠组织的一部分的步骤的示例性插入设备1200的一个实施方案的图示。图12b是描述吸入到设备中的肛门直肠组织1206的一部分的图12a中的示例性插入设备1200的相同实施方案的自上而下的视图说明。图12c是描述将插入设备1200的柱塞1204向上推动以脱离肛门直肠组织的图12a中的示例性插入设备1200的相同实施方案的图示。
在一个实施方案中,插入设备1200包括具有在离顶部的环形开口(在一个实施方案中,被任选的可移动的阀1203覆盖)一定距离的槽1202的大体圆锥形的部分1201。柱塞1204滑动穿过还包括手柄1205的下部的圆柱形部分1210。在一个实施方案中,大体圆柱形的通道在插入设备1200内预形成,穿过所述插入设备1200,导管被穿过以将微型器件植入已经被吸入穿过槽1202的直肠粘膜和粘膜下层中。图12a具体地描述了柱塞1204被向下拉动以产生真空(且阀1203关闭)来将肛门直肠组织1206(参见图12b)比如直肠粘膜和粘膜下层吸入插入设备1200的槽1202中。图12b显示具有被吸入槽1202中的直肠粘膜以及粘膜下层1206的必要部分的插入设备1200的顶视图。然后微型器件利用如以下稍后所讨论的导管可以被插入已吸入的组织1206中。如图12c中所示,向上推柱塞1204打开任选的阀1203,释放真空并且在微型器件已经被植入其中之后还释放已吸入的组织1206。
在不是利用如上所述的柱塞的另一实施方案中,真空通过应用抽吸至插入设备的近侧部分的近端被产生。在一个实施方案中,计量器被用来测量并且标准化产生的真空的量。
图13a至13e描述植入导管1300的实施方案的各种结构。导管1300被设计为穿过在插入设备内预形成的通道。图13a是具有推进器1312以及在所述导管1300内被布置为显著的相互平行的附接的微型器件1310的植入导管1300的示例性结构的一个实施方案的图示。导管1300包括外部护套1311以约束推进器1312和微型器件1310。在图13a的预配置阶段,推进器1312和微型器件1310被布置为显著地相互平行并且被约束在护套1311内。为了促进该布置,推进器1312的前端的柔性部分1320向内弯曲回去以形成尖的似针的边缘1315。微型器件1310被维持在推进器1312的向内弯曲部分1320的尖端。
图13b是描述利用推进器1312被推出所述导管1300的微型器件1310的13a中的植入导管1300的示例性结构的相同实施方案的图示。操作期间,如图13b中所示,推进器1312开始推动微型器件1310穿过导管的开口1325进入组织深处。图13c是描述完全被推出所述导管1300的微型器件1310的13a中的植入导管1300的示例性结构的相同实施方案的图示。当微型器件1310被完全推出护套1311时,弯曲部分1320向外弹(因为由于柔性弯头引起的反作用行为)成为更小的锐角,从而把设备1310与护套1311分隔。图13d是描述被拉回到所述导管1300中的推进器1312的13a中的植入导管1300的示例性结构的相同实施方案的图示。推进器1312被拉回至护套1311中,笔直化弯曲部分1320并且因此将设备1310轻推进入组织深处。图13e是描述被完全拉回进入所述导管1300的推进器1312的13a中的植入导管1300的示例性结构的相同实施方案的图示。将推进器1312完全拉进护套1311中使装置1310脱离推进器1312,从而在组织部位释放设备1310。
图14a至14d是用于微型器件1420进入组织比如粘膜1428、粘膜下层1427以及固有肌层1426的植入的步骤的图示。图14a是描述被放置在靠近患者的肠粘膜1428的所述导管1400的植入导管1400的示例性结构的一个实施方案的图示。导管护套1421被放置在靠近患者的粘膜1428。推进器1422和微型器件1420被放置在护套1421内。图14b是描述微型器件1420被推出导管1400用于植入的步骤的14a中的植入导管1400的示例性结构的相同实施方案的图示。利用推进器1422微型器件1420被推出护套1421,使产生在弯曲部分1425处的锋利边缘刺穿组织并且植入微型器件1420。微型器件1420被植入使得微型器件1420的一端邻近粘膜下层1427并且相反端邻近固有肌层1426。图14c是描述微型器件1420由于弯曲部分1425的笔直化而被配置进入组织部位深处的步骤的14a中的植入导管1400的示例性结构的相同实施方案的图示。推进器1422被缓慢地拉回,笔直化弯曲部分1425并且配置设备1420进入组织深处。图14d是描述使微型器件1420释放在组织部位之后导管1400被拉开的步骤的14a中的植入导管1400的示例性结构的相同实施方案的图示。微型器件1420被释放在组织部位并且护套1421被拉开。在此实施方案中,尖端可以被成形或设计为具有切削边缘以促进插入。此外,在一个实施方案中,缓冲材料比如盐水的注入被用来产生更大的粘膜下层囊以容纳更大的设备。
图15是用于微型器件递送的被放置在患者的肛门直肠区1549中的示例性插入设备1500的一个实施方案的图示。插入设备1500被放置在患者的肛门直肠区1549用于合适的部位以及吸入组织(如根据图12a至12c所讨论的)的定位。图16是植入肛门直肠粘膜下层的具有附接的电极组1625、1626的微型器件1600的一个实施方案的图示。微型器件1600被植入,且第一电极1625放置于邻近直肠环肌层1641而第二电极1626放置于邻近肛门内括约肌1630。
图17是描述利用皮下注射针1703在女性患者中植入微型器件的方法的本说明书的一个实施方案的图示。坐骨结节1701由阴道触诊鉴别并且微型器件利用皮下注射针1703经由皮肤被植入邻近阴部神经1702处。环1704描述根据此实施方案用于植入微型器件的优选的区。
在另一实施方案中,微型器件被通过直肠(perrectally)植入以使设备的一个电极邻近阴部神经并且第二电极邻近肛门直肠结构。通过直肠的或通过阴道的植入方法可以通过成像技术比如超声被进一步协助。
图18是根据本说明书的一个实施方案描述通过肛门内括约肌(ias)和肛门外括约肌(eas)的示例性的选择性刺激所获得的代表性压力曲线1805、1810、1815的图。压力曲线1805仅通过ias的选择性刺激所获得。ias压力的增加是非瞬间的并且改进的ies压力超过电刺激的持续时间。在一个实施方案中,les压力在电刺激的中断之后保持在改进的水平持续至少五分钟。压力曲线1810仅通过eas的选择性刺激获得。eas压力的增加是瞬间的并且改进的ies压力在几分钟之后减退,尽管继续的电刺激。压力曲线1815描绘通过ias和eas的同时刺激获得的累积压力曲线。复合的括约肌压力的增加是瞬间的并且主要归因于由eas压力所做出的贡献,并且是持续的超过刺激的持续时间并且主要归因于由ias压力所做出的贡献。
在一个实施方案中,其中电刺激适合于调节根据本说明书的肛门内括约肌的功能,肛门内括约肌功能的这种调节通过直肠扩张被进一步调节。在一个实施方案中,通过直肠扩张的肛门内括约肌功能的额外的调节导致因刺激引起的所述功能的初始调节的至少10%的增加或减少。
图19a至19c描述微型器件的另外的实施方案。图19a是具有作为阳极的端电极1905和作为阴极的中心电极1910的微型器件1900的一个实施方案的图示。图19b是具有作为阴极的端电极1905和作为阳极的中心电极1910的微型器件1900的另一实施方案的图示。图19c是具有作为阳极和阴极的端电极1905并且具有没有极性的中心电极1910的微型器件1900的又一实施方案的图示。微型器件1900包括三个电极使得每一对电极可以被单独地控制以利用相同或不同的刺激算法刺激不同的解剖学结构。
在一个实施方案中,单一的微型器件被植入两个连续的解剖学结构中(比如两个邻近的神经或两个邻近的肌肉或进入邻近的神经和肌肉结构),在两个连续的结构中的每一个具有一个电极。其后,两个连续的结构通过利用结构特定的电极、刺激脉冲图形、波形或算法被同时或在单独的时间选择性地刺激。例如微型器件可以被植入邻近神经和肌肉处,并且长脉冲(1毫秒-1秒)被用来刺激肌肉结构,而短脉冲(10微秒-999毫秒)被用来刺激神经结构,从而从一个微型器件植入物得到神经刺激和肌肉刺激两者的好处。在另一实施方案中,邻近期望结构的电极被用作去极化电极并且邻近另一结构的电极被用作超极化电极以选择性地刺激第一结构。
在另一实施方案中,微型器件被植入邻近包括传入感觉神经和传出运动神经两者的神经结构处。在不同时间,基于患者输入或生理感觉输入,单一的微型器件利用低频(﹤100hz)可以刺激运动神经并且利用高频(﹥100hz)抑制感觉神经或反之亦然,取决于期望的生理结果。这将导致增加括约肌的张力同时阻止来自直肠的冲动感觉。
在另一实施方案中,微型器件被植入了一个电极在粘膜下层空间和肌肉结构中的每一个。利用短脉冲(﹤1毫秒)刺激粘膜下层神经并且利用长脉冲(≥1毫秒)刺激肌肉。粘膜下层神经刺激和直接肌肉刺激之间的交替消除通过仅神经或仅肌肉的连续刺激的耐受性或疲劳的问题。
在一个实例中,微型器件被植入了每个端电极在内和外肛门括约肌中,其中肛门内括约肌利用更加连续的刺激脉冲图形或算法被刺激以维持连续的基础张力来阻止肛门渗漏,而肛门外括约肌更加根据需要被刺激以阻止不合时宜的排便。此外,肛门内括约肌用短脉冲被刺激以刺激肛门内括约肌中的神经或邻近肛门内括约肌的神经,并且肛门外括约肌用长脉冲被刺激以实现直接的肌肉刺激或反之亦然。脉冲的频率还可以被改变以区别地刺激神经或肌肉或阻止通过神经被传输的感觉。
在本说明书的另一实施方案中,微型器件被植入直肠的粘膜下层中,且一个电极邻近粘膜下层神经丛而另一电极邻近肠肌神经丛。肠肌神经丛用低频脉冲图形或算法被刺激以刺激肠肌层神经,而粘膜下丛用高频脉冲图形或算法被刺激以阻止粘膜下丛或反之亦然。在另一实施方案中,两个丛在不同的时间用相同的脉冲图形或脉冲算法被刺激以实现期望的生理效果。
在另一实施方案中,微型器件被植入肛门直肠壁中,且一个电极邻近肛门直肠神经丛而另一电极邻近阴部神经或骶神经的分支。肛门直肠神经丛以更加连续的方式被刺激以维持基础的肛门内括约肌张力,而阴部或骶神经以更加根据需要的方式被刺激以产生肛门外括约肌挤压压力来中止或阻止不合时宜的排便。
在另一实施方案中,微型器件沿着阴部或骶神经的长度被植入,其中近侧的一对电极递送高频阻隔脉冲以阻止传递感觉的传入感觉到大脑并且远侧的一对电极递送低频刺激脉冲以刺激内和外括约肌中的一个或两个以维持基础的静息张力和/或产生挤压压力。
在另一实施方案中,微型器件沿着阴部或骶神经的长度植入,其中近侧的一对电极递送低频刺激脉冲以刺激传递感觉的传入感觉到大脑,并且远侧的一对电极递送高频阻隔脉冲以阻止内和外肛门括约肌中的一个或两个来消除基础的静息张力和/或消除挤压压力,从而启动具有排便紊乱比如便秘的患者的肠运动。
在另一实施方案中,微型器件被植入,且每个端电极在肛门外括约肌的深部和浅部中,其中肛门外括约肌的两个部分被轮流刺激,允许一个部分静止的时候另一个被刺激,因此在没有耐受性或肌肉疲劳的问题的情况下增加挤压压力的持续时间。此外,肛门外括约肌的两个部分可以用短脉冲被轮流刺激以刺激肛门外括约肌中的神经或邻近肛门外括约肌的神经,并且用长脉冲实现直接的肛门外括约肌刺激,因此在没有耐受性或肌肉疲劳的问题的情况下进一步增加挤压压力的持续时间。
在另一实施方案中,微型器件被植入,且电极在直肠远端的内环肌层和肛门内括约肌中的每一个,其中两个结构被同时刺激。该配置允许两个生理结构同步收缩并且协同增加直肠出口处的高压力区的长度有效地增加肛门括约肌的功能性长度。这导致增强的括约肌的有效的能力,即使在括约肌压力的下限。此实施方案允许维持括约肌能力即使在低水平的电刺激下并且因此减少通常在较高水平的电刺激下观察到的耐受性或肌肉疲劳的问题。此外,直肠的环肌能够作为高压力区和功能性的括约肌作用,从而维持具有被损伤的括约肌比如具有导致会阴撕裂以及肛门括约肌损伤的产伤的女性的那些患者的自制。
在另一实施方案中,微型器件被植入,且电极在直肠远端的内环肌层和肛门内括约肌中的每一个,其中两个结构被按顺序刺激。这允许导致排便的直肠收缩以及肛管松弛。此配置能够实现由于括约肌协同失调的功能障碍的出口型便秘的治疗。
具有肠易激综合征的患者通常遭受交替的便秘以及具有粪便紧迫感的症状的腹泻。在一个实施方案中,本说明书的电子医疗设备允许患者利用如上所述的不同的电极组合和不同的刺激算法控制各自的症状。
在另一实施方案中,本发明的设备可以利用标准引线植入技术,利用外科手术植入患者的身体中的标准的可植入的脉冲发生器以及被植入到邻近靶向组织处的电极来体现。
以上实例仅仅是本发明的系统的许多应用的说明。尽管本发明的仅少数的实施方案已经在此被描述,但是应该理解,本发明可以以许多其他的特殊形式被体现,而并不背离本发明的精神或范围。因此,本实例以及实施方案将被认为是说明性的并且不是限制性的,并且本发明可以在所附权利要求的范围内被修改。
相关知识
肛门时不时疼痛难耐?功能性肛门直肠痛可这样缓解
肛门直肠损伤
肛门电击治疗前列腺炎
电击棒插入肛门会出问题吗 如何保护肛门
新妈妈怎么应对肛门问题
低位直肠癌,保肛有“密码”
有一种特殊养生方式,它在肛门调理,叫做【直肠全息疗法】
电击肛门睾丸失禁
神经源性下尿路功能障碍的物理治疗:方法和适应症
肛交
网址: 电刺激肛门直肠结构以治疗肛门功能障碍的系统和方法与流程 https://m.trfsz.com/newsview734567.html