AI360全景影像系统的技术原理
车载AI360全景影像系统的技术原理,通过集成AI算法,增加预警与物体识别功能,其实现技术原理主要包括以下几个方面:
一、图像采集与传输
摄像头布局:车载360全景影像系统通常会在车辆的前、后、左、右以及车顶或后视镜等位置安装多个摄像头,以捕捉车辆周围的图像。
图像传输:摄像头捕捉到的图像数据会被实时传输到车载处理器或显示屏上。这些图像数据会经过压缩和编码处理,以便进行实时传输和后续处理。
二、图像拼接与融合
图像拼接技术:车载处理器会对来自不同摄像头的图像数据进行拼接,形成一个完整的360度全景视图。这个过程涉及到图像校正、图像融合等处理,以确保终合成的全景图像能够准确地反映车辆周围的实际情况。图像校正:由于摄像头的位置和角度不同,所拍摄的图像会存在一定的畸变,如T视畸变和径向畸变等。因此,需要对图像进行适当的校正处理,以消除这些畸变。
图像融合:将校正后的图像进行融合处理,形成一个无缝的全景画面。这个过程可能涉及到图像对齐、裁剪、旋转等操作,以确保图像能够无缝地拼接在一起。
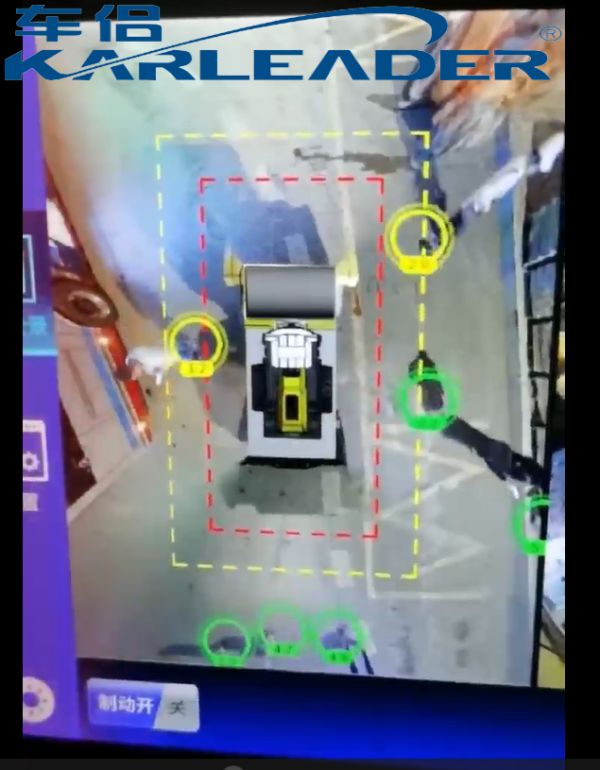
三、AI算法集成与物体识别
AI算法应用:在图像拼接和融合的基础上,集成AI算法进行物体识别和预警。AI算法通过深度学习等技术对图像中的目标进行特征提取和识别,能够准确地识别出车辆周围的行人、车辆、障碍物等物体。
物体识别精度:AI算法通过不断优化和训练,提高物体识别的精度和鲁棒性。它能够应对不同光照条件、遮挡情况、复杂背景等挑战,确保识别的准确性和可靠性。
四、预警机制设计
预警触发条件:当AI算法识别到潜在的危险源时,如行人、车辆等物体靠近车辆到一定距离时,系统会触发预警机制。
预警方式:预警方式可以包括声光预警、语音提示等。系统会通过车载显示屏、扬声器等设备向驾驶员发出预警信号,提醒驾驶员注意潜在的危险。
五、系统稳定性与可靠性
抗干扰能力:车载环境复杂多变,系统需要具备较强的抗干扰能力,以应对电磁干扰、振动、温度变化等不利因素的影响。
故障自诊断与恢复:系统应具备故障自诊断与恢复能力,能够在发生故障时及时报警并尝试恢复正常运行,确保行车安全。
综上所述,车载AI360全景影像系统的技术原理,通过集成AI算法实现预警与物体识别功能的技术原理是一个复杂而精细的过程。它涉及到图像采集与传输、图像拼接与融合、AI算法集成与物体识别以及预警机制设计等多个方面。通过不断优化和改进这些技术环节,车载360全景影像系统能够为驾驶员提供更加Q面、准确、可靠的行车辅助信息,提高行车安全性和便利性。
相关知识
医学影像技术专业简介
李真林:全面推进医学影像技术学科发展 提升我国医学影像技术学影响力
泌尿系统影像学检查
医学影像检查技术概述.ppt 全文免费
AI技术突破,打造智慧健康管理系统
成都全景医学影像专家谈PET/MR检查的健康意义
全面解析无线WiFi BLE模块:技术原理、应用场景和未来发展趋势
医院电子病历系统所需要的3大关键技术!
智能健康管理系统开发项目背景概述.docx
健康有益AI技术开放平台,全面赋能健康医疗行业全场景
网址: AI360全景影像系统的技术原理 https://m.trfsz.com/newsview883059.html